Liens rapides :
Publications sélectionnées

Toward Teach and Repeat Across Seasonal Deep Snow Accumulation
(Seulement en anglais) Download article Visit FoMo page We deployed again to Forêt Montmorency in March 2025. With over 1 m of snow accumulation, it was a perfect time to st...
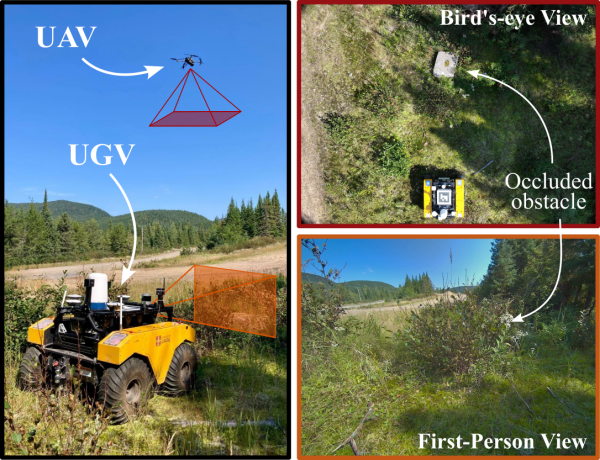
UAV-Assisted Self-Supervised Terrain Awareness for Off-Road Navigation
(Seulement en anglais) Paper Link

Exposing the Unseen: Exposure Time Emulation for Offline Benchmarking of Vision Algorithms
(Seulement en anglais) Download article Visit GitHub page
Proprioception Is All You Need: Terrain Classification for Boreal Forests
(Seulement en anglais) Webpage ArXiv preprint Slides Cite this
Saturation-Aware Angular Velocity Estimation: Extending the Robustness of SLAM to Aggressive Motions
(Seulement en anglais) We propose a novel angular velocity estimation method to increase the robustness of Simultaneous Localization And Mapping (SLAM) algorithms against gyroscope...
Extrinsic calibration for highly accurate trajectories reconstruction
(Seulement en anglais) In the context of robotics, accurate ground-truth positioning is the cornerstone for the development of mapping and localization algorithms. In outdoor envir...

Kilometer-scale autonomous navigation in subarctic forests: challenges and lessons learned
(Seulement en anglais)
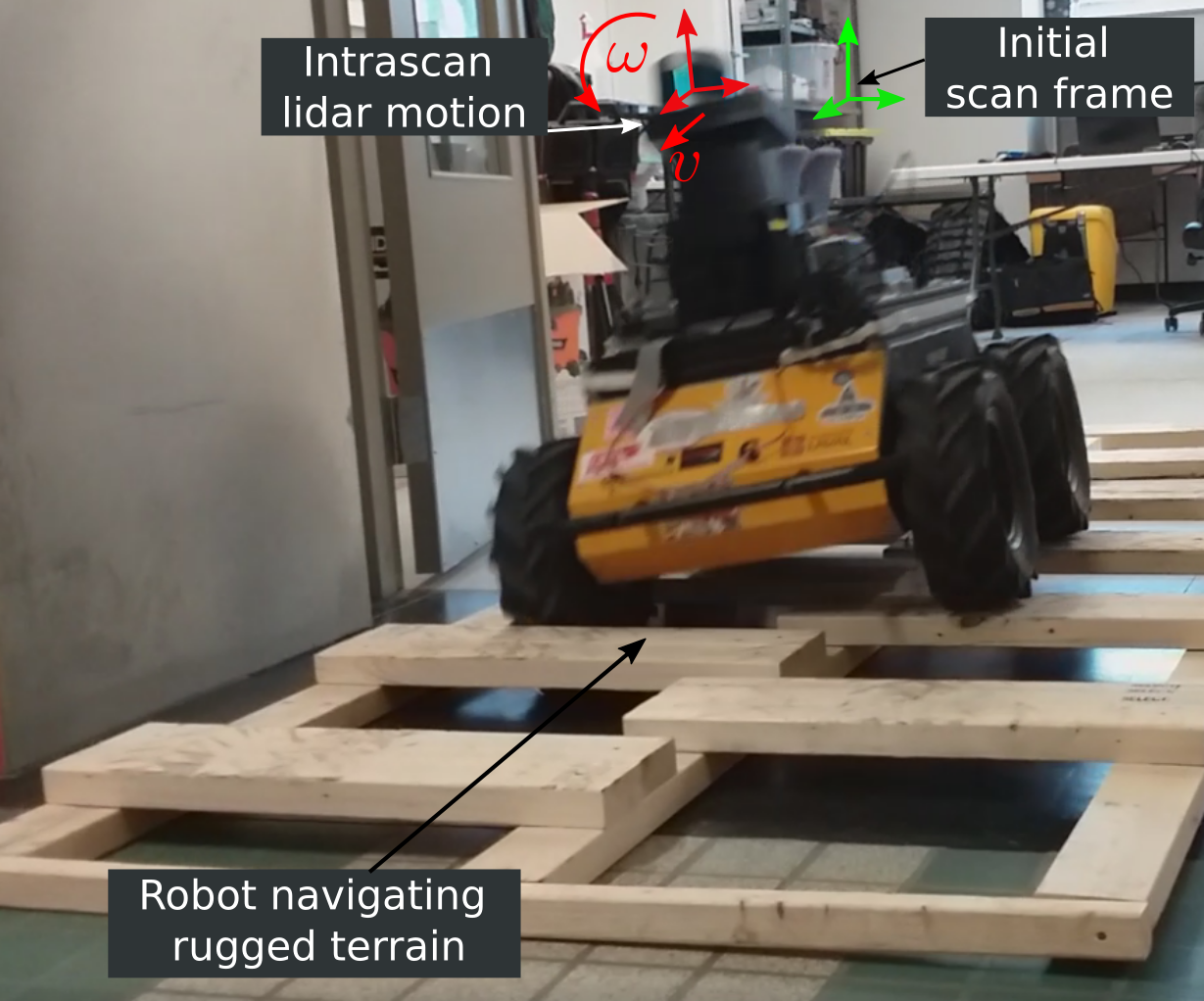
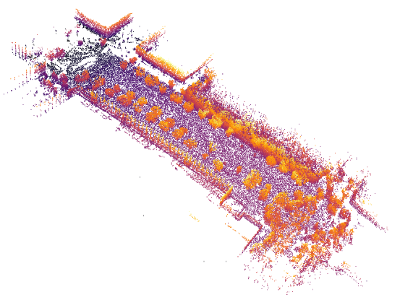
Lidar Scan Registration Robust to Extreme Motions
(Seulement en anglais) Registration algorithms, such as Iterative Closest Point (ICP), have proven effective in mobile robot localization algorithms over the last decades. However,...

Accurate outdoor ground truth based on total stations
(Seulement en anglais) In robotics, accurate ground-truth position fostered the development of mapping and localization algorithms through creation of cornerstone datasets. In outd...

Improving the Iterative Closest Point Algorithm using Lie Algebra
(Seulement en anglais) Mapping algorithms that rely on registering point clouds inevitably suffer from local drift, both in localization and in the built map. Applications that req...
Geometry Preserving Sampling Method based on Spectral Decomposition for Large-scale Environments
(Seulement en anglais) In the context of 3D mapping, larger and larger point clouds are acquired with lidar sensors. Although pleasing to the eye, dense maps are not necessarily ta...

Evaluation of Skid-Steering Kinematic Models for Subarctic Environments
(Seulement en anglais) In subarctic and arctic areas, large and heavy skid-steered robots are preferred for their robustness and ability to operate on difficult terrain. State esti...

Large-scale 3D Mapping of Subarctic Forests
(Seulement en anglais) The ability to map challenging subarctic environments opens new horizons for robotic deployments in industries such as forestry, surveillance, and open-pit m...
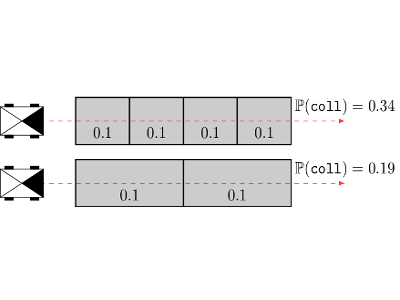
Lambda-Field: A Continuous Counterpart of the Bayesian Occupancy Grid for Risk Assessment
(Seulement en anglais) In a context of autonomous robots, one of the most important tasks is to ensure the safety of the robot and its surrounding. The risk of navigation is usuall...

Lidar Measurement Bias Estimation via Return Waveform Modelling in a Context of 3D Mapping
(Seulement en anglais) In a context of 3D mapping, it is very important to obtain accurate measurements from sensors. In particular, LIDAR measurements are typically treated as a z...
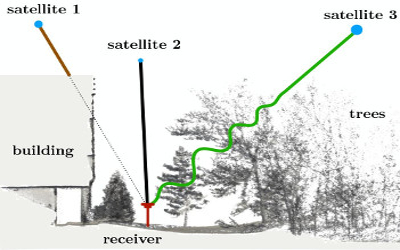
Predicting GNSS satellite visibility from dense point clouds
(Seulement en anglais) To help future mobile agents plan their movement in harsh environments,a predictive model has been designed to determine what areas would be favorable for Gl...

Automatic 3D Mapping for Tree Diameter Measurements in Inventory Operations
(Seulement en anglais) Forestry is a major industry in many parts of the world. It relies on forest inventory, which consists of measuring tree attributes. We propose to use 3D m...

Enquête sur l'utilisation des lidars avec les UAV et la cartographie souterraine
Cette enquête présente une vue générale des projets utilisant des lidars (Technologie de mesure de distance et détection par laser) sur des UAV (Véhicule Aér...

Learning a Bias Correction for Lidar-only Motion Estimation
(Seulement en anglais) This paper presents a novel technique to correct for bias in a classical estimator using a learning approach. We apply a learned bias correction to a lidar-o...
A Review of Point Cloud Registration Algorithms for Mobile Robotics
(Seulement en anglais) The topic of this review is geometric registration in robotics. Registration algorithms associate sets of data into a common coordinate system. They have b...
Challenging Data Sets for Point Cloud Registration Algorithms
(Seulement en anglais) This group of datasets was recorded with the aim to test point cloud registration algorithms in specific environments and conditions. Special care is taken ...
Liste exhaustive
2026
- Samson, N., Larrivée-Hardy, W., Dubois, W., Roy-Brouard, É., Brotherton, E., Baril, D., Lépine, J., & Pomerleau, F. (2026). Assessing the Unpredictability of Uncrewed Ground Vehicle Command on Multiple Terrains. Colloque REPARTI, Université Laval.
Bibtex source - Turgeon-Roy, M., Boxan, M., & Pomerleau, F. (2026). Towards high mobility in snow: Analyzing the effect of center of mass on deep snow locomotion. Colloque REPARTI, Université Laval.
Bibtex source - Fecteau, W., Samson, N., Ounally, M., & Pomerleau, F. (2026). Twist, Store, Release: Investigating the Spring-like Behavior of Heavy Skid-Steer Robot Turning. Colloque REPARTI, Université Laval.
Bibtex source - Brotherton, E., Gamache, O., & Pomerleau, F. (2026). Challenges of the Arctic for Robotic Systems: Overview of the Nanook Mission 2026. Colloque REPARTI, Université Laval.
Bibtex source - Jeanson, G., Duclos, D.-A., Larrivée-Hardy, W., Cochet, N., Boxan, M., Deschênes, A., Pomerleau, F., & Giguère, P. (2026). Leveraging Image Generators to Address Training Data Scarcity: The Gen4Regen Dataset for Forest Regeneration Mapping. Colloque REPARTI, Université Laval.
Bibtex source
2025
- Dannaoui, A.-R., Laconte, J., Debain, C., Pomerleau, F., & Checchin, P. (2025). Seasons of Knowledge: Unstructured Map Maintenance for Long-Term Spatial Understanding. presented to the Journée des Jeunes Chercheuses et Jeunes Chercheurs en Robotique 2024 (JJCR).
Bibtex source - Dannaoui, A.-R., Laconte, J., Debain, C., Pomerleau, F., & Checchin, P. (2025). When and Where Localization Fails: An Analysis of the Iterative Closest Point in Evolving Environment. Proceedings of the IEEE European Conference on Mobile Robots (ECMR). https://arxiv.org/abs/2507.17531
Publisher Bibtex source - Samson, N., Larrivée-Hardy, W., Dubois, W., Roy-Brouard, É., Brotherton, E., Baril, D., Lépine, J., & Pomerleau, F. (2025). DRIVE Through the Unpredictability: From a Protocol Investigating Slip to a Metric Estimating Command Uncertainty. IEEE Transactions on Field Robotics, 2, 380–399. https://doi.org/10.1109/TFR.2025.3580397
Publisher Bibtex source - Gamache, O., Fortin, J.-M., Boxan, M., Pomerleau, F., & Giguère, P. (2025). Reproducible Evaluation of Camera Auto-Exposure Methods in the Field: Platform, Benchmark, and Lessons Learned. IEEE Transactions on Field Robotics, 2, 270–287. https://doi.org/10.1109/TFR.2025.3566694
Publisher Bibtex source - Dubois, W., Samson, N., Daum, E., Laconte, J., & Pomerleau, F. (2025). Under Pressure: Altimeter-Aided ICP for 3D Maps Consistency. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). https://doi.org/10.1109/ICRA55743.2025.11128024
Publisher Bibtex source - Fortin, J.-M., Gamache, O., Fecteau, W., Daum, E., Larrivée-Hardy, W., Pomerleau, F., & Giguère, P. (2025). UAV-Assisted Self-Supervised Terrain Awareness for Off-Road Navigation. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). https://doi.org/10.1109/ICRA55743.2025.11128050
Publisher Bibtex source - Boxan, M., Krawciw, A., Barfoot, T. D., & Pomerleau, F. (2025). Toward Teach and Repeat Across Seasonal Deep Snow Accumulation. presented to the 2025 Workshop on Field Robotics from IEEE International Conference on Robotics and Automation (ICRA). https://arxiv.org/abs/2505.01339
Publisher Bibtex source - Vannini, V., Dubois, W., Gamache, O., Fortin, J.-M., Samson, N., Daum, E., Pomerleau, F., & Brotherton, E. (2025). ASAP-MO: Advanced Situational Awareness and Perception for Mission-critical Operations. presented to the 2025 Workshop on Field Robotics from IEEE International Conference on Robotics and Automation (ICRA). https://arxiv.org/abs/2505.01547
Publisher Bibtex source - Nasiri, K., Guimont-Martin, W., LaRocque, D., Jeanson, G., Bellemare-Vallières, H., Grondin, V., Bournival, P., Lessard, J., Drolet, G., Sylvain, J.-D., & Giguère, P. (2025). Using Citizen Science Data as Pre-Training for Semantic Segmentation of High-Resolution UAV Images for Natural Forests Post-Disturbance Assessment. Forests, 16(4), 616. https://doi.org/10.3390/f16040616
Publisher Bibtex source - Nasiri, K. (2025). Using citizen science data for natural forests post-disturbance semantic segmentation via deep learning [Master's thesis, Université Laval]. https://corpus.ulaval.ca/entities/publication/c454a1c3-e4ad-4fb0-ab39-10bb1d89e6d5
Publisher Bibtex source
2024
- Baril, D. (2024). Improving the robustness of motion modeling, control and localization for mobile robots in harsh conditions [PhD thesis, Université Laval]. https://corpus.ulaval.ca/entities/publication/b247c075-2924-4798-9bb4-9f9af9c300d5
Publisher Bibtex source - Vaidis, M. (2024). Generation of six-degrees-of-freedom control trajectories using three robotic total stations for mobile robotics [PhD thesis, Université Laval]. https://corpus.ulaval.ca/entities/publication/3d84ad6f-a865-4ac5-8b97-c70549dc81a2
Publisher Bibtex source - LaRocque, D. (2024). Terrain analysis using data from proprioceptive sensors on mobile robots [Master's thesis, Université Laval]. https://corpus.ulaval.ca/entities/publication/8adad954-87d5-4ff1-99f3-26b1a9a25c37
Publisher Bibtex source - LaRocque, D., Guimont-Martin, W., Duclos, D.-A., Giguère, P., & Pomerleau, F. (2024). Proprioception Is All You Need: Terrain Classification for Boreal Forests. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 11686–11693. https://doi.org/10.1109/iros58592.2024.10801407
PDF Slides Publisher Bibtex source - Gamache, O., Fortin, J.-M., Boxan, M., Vaidis, M., Pomerleau, F., & Giguère, P. (2024). Exposing the Unseen: Exposure Time Emulation for Offline Benchmarking of Vision Algorithms. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 11110–11117. https://doi.org/10.1109/IROS58592.2024.10803057
Publisher Bibtex source - Deschênes, S.-P., Baril, D., Boxan, M., Laconte, J., Giguère, P., & Pomerleau, F. (2024). Saturation-Aware Angular Velocity Estimation: Extending the Robustness of SLAM to Aggressive Motions. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). https://doi.org/https://doi.org/10.48550/arXiv.2310.07844
PDF Publisher Bibtex source - Baril, D., Deschênes, S.-P., Coupal, L., Goffin, C., Lépine, J., Giguère, P., & Pomerleau, F. (2024). DRIVE: Data-driven Robot Input Vector Exploration. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). https://doi.org/10.1109/ICRA57147.2024.10611172
Publisher Bibtex source - Grondin, V., Massicotte, P., Gaha, M., Pomerleau, F., & Giguère, P. (2024, May). Leveraging Prompt-Based Segmentation Models and Large Dataset to Improve Detection of Trees. Proceedings of the Conference on Robots and Vision. https://crv.pubpub.org/pub/it4xxpil
Publisher Bibtex source - Dubois, W., Boxan, M., Laconte, J., & Pomerleau, F. (2024). 3D Mapping of Glacier Moulins: Challenges and lessons learned. presented to the 2024 Workshop on Field Robotics from IEEE International Conference on Robotics and Automation (ICRA). https://arxiv.org/abs/2404.18790
Publisher Bibtex source - Samson, N., Baril, D., Lépine, J., & Pomerleau, F. (2024). Comparing Motion Distortion Between Vehicle Field Deployments. presented to the 2024 Workshop on Field Robotics from IEEE International Conference on Robotics and Automation (ICRA). https://doi.org/10.48550/arXiv.2405.00189
Publisher Bibtex source - Gamache, O., Fortin, J.-M., Boxan, M., Pomerleau, F., & Giguère, P. (2024). Field Report on a Wearable and Versatile Solution for Field Acquisition and Exploration. presented to the 2024 Workshop on Field Robotics from IEEE International Conference on Robotics and Automation (ICRA). https://doi.org/10.48550/arXiv.2405.00199
Publisher Bibtex source - Boxan, M., Krawciw, A., Daum, E., Qiao, X., Lilge, S., Barfoot, T. D., & Pomerleau, F. (2024). FoMo: A Proposal for a Multi-Season Dataset for Robot Navigation in Forêt Montmorency. presented to the 2024 Workshop on Field Robotics from IEEE International Conference on Robotics and Automation (ICRA). https://arxiv.org/abs/2404.13166
Publisher Bibtex source - Vaidis, M., Shahraji, M. H., Daum, E., Dubois, W., Giguère, P., & Pomerleau, F. (2024). RTS-GT: Robotic Total Stations Ground Truthing dataset. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). https://arxiv.org/abs/2309.11935
Publisher Bibtex source
2023
- Gariepy, R., Siegel, H., Allen, A., Burke, T., Deguire, C., Gosselin, C., Jackson, E., MacFarlane, D., Molina, P., Monsarrat, B., Moon, A. J., Ower, C., Pilote, F., Pomerleau, F., Reedman, T., & Sun, Y. (2023). Canadian Robotics Council 2022 Symposium - What We Heard Report. Canadian Robotics Coucil.
Bibtex source - Daum, E., Vaidis, M., & Pomerleau, F. (2023). Benchmarking ground truth trajectories with robotic total stations. presented at the Workshop on Methods for Objective Comparison of Results in Intelligent Robotics Research from the IEEE IROS 2023. https://arxiv.org/abs/2309.05134 Best paper award!
Publisher Bibtex source - Vaidis, M., Dubois, W., Daum, E., LaRocque, D., & Pomerleau, F. (2023). Uncertainty analysis for accurate reference trajectories with robotic total stations. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS). https://ieeexplore.ieee.org/abstract/document/10341529 Accepted for oral presentation
Publisher Bibtex source - Guimont-Martin, W., Fortin, J.-M., Pomerleau, F., & Giguère, P. (2023). MaskBEV: Joint Object Detection and Footprint Completion for Bird’s-eye View 3D Point Clouds. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS). Accepted for oral presentation
Bibtex source - Vaidis, M., Dubois, W., Guénette, A., Laconte, J., Kubelka, V., & Pomerleau, F. (2023). Extrinsic calibration for highly accurate trajectories reconstruction. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 4185–4192. https://doi.org/10.1109/ICRA48891.2023.10160505
Publisher Bibtex source - Ebadi, K., Bernreiter, L., Biggie, H., Catt, G., Chang, Y., Chatterjee, A., Denniston, C. E., Deschênes, S.-P., Harlow, K., Khattak, S., Nogueira, L., Palieri, M., Petráček, P., Petrlík, M., Reinke, A., Krátký, V., Zhao, S., Agha-Mohammadi, A.-A., Alexis, K., … Carlone, L. (2023). Present and Future of SLAM in Extreme Environments: The DARPA SubT Challenge. IEEE Transactions on Robotics (T-RO). https://doi.org/10.1109/TRO.2023.3323938
Publisher Bibtex source - Deschênes, S.-P., Baril, D., Kubelka, V., Giguère, P., & Pomerleau, F. (2023). Lidar Scan Registration Robust to Extreme Motions. Colloque REPARTI, Université Laval.
Bibtex source - Boxan, M., & Pomerleau, F. (2023). 3D Point Clouds Reconstruction of Environment Subject to Thin Structures. Colloque REPARTI, Université Laval.
Bibtex source - Vaidis, M., Dubois, W., Guénette, A., Laconte, J., Kubelka, V., & Pomerleau, F. (2023). Extrinsic calibration for highly accurate trajectories reconstruction. Colloque REPARTI, Université Laval.
Bibtex source - Shahraji, M. H., Larouche, C., & Pomerleau, F. (2023). Marine Mobile Mapping for Port Infrastructure Monitoring. Colloque REPARTI, Université Laval.
Bibtex source - Guimont-Martin, W., Fortin, J.-M., Pomerleau, F., & Giguère, P. (2023). MaskBEV: Joint Object Detection and Footprint Completion for Bird’s-eye View 3D Point Clouds. Colloque REPARTI, Université Laval.
Bibtex source - Courcelle, C., Baril, D., Pomerleau, F., & Laconte, J. (2023). On the Importance of Quantifying Visibility for Autonomous Vehicles under Extreme Precipitation. In H. Abut, G. Schmidt, K. Takeda, J. Lambert, & J. H. L. Hansen (Eds.), Towards Human-Vehicle Harmonization (Vol. 3, pp. 239–250). De Gruyter. https://doi.org/doi:10.1515/9783110981223-018
Publisher Bibtex source - Pomerleau, F. (2023). Robotics in Snow and Ice. In M. H. Ang, O. Khatib, & B. Siciliano (Eds.), Encyclopedia of Robotics (pp. 1–6). Springer Berlin Heidelberg.
PDF Bibtex source
2022
- Grondin, V., Fortin, J.-M., Pomerleau, F., & Giguère, P. (2022). Tree Detection and Diameter Estimation Based on Deep Learning. Forestry: An International Journal of Forest Research, 96(2), 264–276. https://doi.org/10.1093/forestry/cpac043
Publisher Bibtex source - Kubelka, V., Vaidis, M., & Pomerleau, F. (2022). Gravity-constrained point cloud registration. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), 4873–4879. https://doi.org/10.1109/IROS47612.2022.9981916
Publisher Bibtex source - Fortin, J.-M., Gamache, O., Grondin, V., Pomerleau, F., & Giguère, P. (2022). Instance Segmentation for Autonomous Log Grasping in Forestry Operations. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), 6064–6071. https://doi.org/10.1109/IROS47612.2022.9982286. Finalist for Best Paper Award on Agri-Robotics! Accepted for oral presentation
Publisher Bibtex source - Rouček, T., Pecka, M., Čížek, P., Petříček, T., Bayer, J., Šalanský, V., Azayev, T., Heřt, D., Petrlík, M., Báča, T., Spurný, V., Krátký, V., Petráček, P., Baril, D., Vaidis, M., Kubelka, V., Pomerleau, F., Faigl, J., Zimmermann, K., … Krajník, T. (2022). System for multi-robotic exploration of underground environments CTU-CRAS-NORLAB in the DARPA Subterranean Challenge. Field Robotics, 2(1), 1779–1818. https://doi.org/10.55417/fr.2022055
Publisher Bibtex source - Baril, D., Deschênes, S.-P., Gamache, O., Vaidis, M., LaRocque, D., Laconte, J., Kubelka, V., Giguère, P., & Pomerleau, F. (2022). Kilometer-scale autonomous navigation in subarctic forests: challenges and lessons learned. Field Robotics, 2(1), 1628–1660. https://doi.org/10.55417/fr.2022050
PDF Publisher Bibtex source - Grondin, V., Pomerleau, F., & Giguère, P. (2022). Training Deep Learning Algorithms on Synthetic Forest Images for Tree Detection. ICRA 2022 Workshop - Innovation in Forestry Robotics: Research and Industry Adoption.
Bibtex source
2021
- Laconte, J., Kasmi, A., Pomerleau, F., Chapuis, R., Malaterre, L., Debain, C., & Aufrère, R. (2021). A Novel Occupancy Mapping Framework for Risk-Aware Path Planning in Unstructured Environments. Sensors, 21(22), 7562.
Bibtex source - Laconte, J., Randriamiarintsoa, E., Kasmi, A., Pomerleau, F., Chapuis, R., Debain, C., & Aufrère, R. (2021). Dynamic Lambda-Field: A Counterpart of the Bayesian Occupancy Grid for Risk Assessment in Dynamic Environments. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS).
Bibtex source - Vaidis, M., Giguère, P., Pomerleau, F., & Kubelka, V. (2021). Accurate outdoor ground truth based on total stations. 2021 18th Conference on Robots and Vision (CRV). https://arxiv.org/abs/2104.14396
PDF Publisher Bibtex source - Deschênes, S.-P., Baril, D., Kubelka, V., Giguère, P., & Pomerleau, F. (2021). Lidar Scan Registration Robust to Extreme Motions. 2021 18th Conference on Robots and Vision (CRV). https://doi.org/10.1109/CRV52889.2021.00014
PDF Publisher Bibtex source - Chahine, G., Vaidis, M., Pomerleau, F., & Pradalier, C. (2021). Mapping in unstructured natural environment: A sensor fusion framework for wearable sensor suites. SN Applied Sciences, 3(5).
Bibtex source
2020
- Kasmi, A., Laconte, J., Aufrère, R., Denis, D., & Chapuis, R. (2020). End-to-end probabilistic ego-vehicle localization framework. IEEE Transactions on Intelligent Vehicles.
Bibtex source - Kasmi, A., Laconte, J., Aufrère, R., Theodose, R., Denis, D., & Chapuis, R. (2020). An Information Driven Approach For Ego-Lane Detection Using Lidar And OpenStreetMap. 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), 522–528.
Bibtex source - Vaidis, M., Laconte, J., Kubelka, V., & Pomerleau, F. (2020). Improving the Iterative Closest Point Algorithm using Lie Algebra. In IROS 2020 Workshop - Bringing geometric methods to robot learning, optimization and control. https://doi.org/10.1109/CRV52889.2021.00012
Bibtex source - Kubelka, V., Dandurand, P., Babin, P., Giguère, P., & Pomerleau, F. (2020). Radio propagation models for differential GNSS based on dense point clouds. Journal of Field Robotics. https://doi.org/10.1002/rob.21988
Publisher Bibtex source - Tremblay, J.-F., Béland, M., Pomerleau, F., Gagnon, R., & Giguère, P. (2020). Automatic 3D Mapping for Tree Diameter Measurements in Inventory Operations. Journal of Field Robotics. https://doi.org/10.1002/rob.21980 Special issue: Field and Service Robotics
Publisher Bibtex source - Labussière, M., Laconte, J., & Pomerleau, F. (2020). Geometry Preserving Sampling Method based on Spectral Decomposition for Large-scale Environments. Frontiers in Robotics and AI – Multi-Robot Systems, 7, 134. https://doi.org/10.3389/frobt.2020.572054
Publisher Bibtex source - Baril, D., Grondin, V., Deschenes, S., Laconte, J., Vaidis, M., Kubelka, V., Gallant, A., Giguere, P., & Pomerleau, F. (2020). Evaluation of Skid-Steering Kinematic Models for Subarctic Environments. 2020 17th Conference on Computer and Robot Vision (CRV), 198–205. https://doi.org/10.1109/CRV50864.2020.00034 Best Robotic Vision Paper Award!
PDF Publisher Bibtex source
2019
- Rouček, T., Pecka, M., Cizek, P., Petricek, T., Bayer, J., Salansky, V., Hert, D., Petrlik, M., Baca, T., Spurny, V., Pomerleau, F., Kubelka, V., Faigl, J., Zimmermann, K., Saska, M., Svoboda, T., & Krajnik, T. (2019). DARPA Subterranean Challenge: Multi-robotic exploration of underground environments. Proceeding of the Modelling and Simulation for Autonomous System Workshop (MESAS).
Bibtex source - Dandurand, P., Babin, P., Kubelka, V., Giguère, P., & Pomerleau, F. (2019). Predicting GNSS satellite visibility from dense point clouds. Proceedings of the Conference on Field and Service Robotics (FSR). Springer Tracts in Advanced Robotics.
PDF Bibtex source - Dandurand, P. (2019). Application et analyse de GNSS dans l’industrie forestière [Master's thesis, Université Laval]. https://corpus.ulaval.ca/jspui/handle/20.500.11794/37873?mode=full
Publisher Bibtex source - Tremblay, J.-F., Béland, M., Pomerleau, F., Gagnon, R., & Giguère, P. (2019). Automatic 3D Mapping for Tree Diameter Measurements in Inventory Operations. Proceedings of the Conference on Field and Service Robotics (FSR). Springer Tracts in Advanced Robotics.
PDF Slides Bibtex source - Tremblay, J.-F. (2019). Forest inventory with a lidar-equipped robot for difficult environments [Master's thesis, Université Laval]. https://corpus.ulaval.ca/jspui/handle/20.500.11794/37634?mode=full
Publisher Bibtex source - Pradalier, C., Aravecchia, S., & Pomerleau, F. (2019). Multi-session lake-shore monitoring in visually challenging conditions. Proceedings of the Conference on Field and Service Robotics (FSR). Springer Tracts in Advanced Robotics.
Bibtex source - Landry, D., Pomerleau, F., & Giguère, P. (2019). CELLO-3D: Estimating the Covariance of ICP in the Real World. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA).
PDF Bibtex source - Landry, D. (2019). Data-driven covariance estimation for the iterative closest point algorithm [Master's thesis, Université Laval]. https://corpus.ulaval.ca/jspui/handle/20.500.11794/34734?mode=full
Publisher Bibtex source - Babin, P., Giguère, P., & Pomerleau, F. (2019). Analysis of Robust Functions for Registration Algorithms. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). https://doi.org/10.1109/ICRA.2019.8793791
PDF Publisher Bibtex source - Babin, P., Dandurand, P., Kubelka, V., Giguère, P., & Pomerleau, F. (2019). Large-scale 3D Mapping of Subarctic Forests. Proceedings of the Conference on Field and Service Robotics (FSR). Springer Tracts in Advanced Robotics.
PDF Slides Bibtex source - Babin, P. (2019). Analysis of error functions for the iterative closest point algorithm [Master's thesis, Université Laval]. https://corpus.ulaval.ca/jspui/handle/20.500.11794/37990?mode=full
Publisher Bibtex source - Laconte, J., Deschênes, S.-P., Labussière, M., & Pomerleau, F. (2019). Lidar Measurement Bias Estimation via Return Waveform Modelling in a Context of 3D Mapping. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA).
PDF Bibtex source - Laconte, J., Debain, C., Chapuis, R., Pomerleau, F., & Aufrere, R. (2019). Lambda-Field: A Continuous Counterpart of the Bayesian Occupancy Grid for Risk Assessment. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS).
Bibtex source
2018
- Labussière, M., Laconte, J., & Pomerleau, F. (2018). Geometry Preserving Sampling Method based on Spectral Decomposition for 3D Registration. arXiv preprint arXiv:1810.01666.
Bibtex source - Landry, D., Pomerleau, F., & Giguère, P. (2018). Data-driven covariance estimation of the iterative closest point algorithm. Rendez-vous en intelligence artificielle de Québec.
Bibtex source - Babin, P., Pomerleau, F., & Giguère, P. (2018). Improving the robustness of registration algorithm in complex environments. Colloque du regroupement FRQNT-REPARTI.
Bibtex source - Tremblay, J.-F., & Béland, M. (2018). Towards operational marker-free registration of terrestiral lidar data in forests. Colloque du regroupement FRQNT-REPARTI.
Bibtex source - Tang, T., Yoon, D., Pomerleau, F., & Barfoot, T. D. (2018). Learning a Bias Correction for Lidar-Only Motion Estimation. Proceedings of the 15th Conference on Computer and Robot Vision (CRV).
Bibtex source - McGarey, P., Yoon, D., Tang, T., Pomerleau, F., & Barfoot, T. D. (2018). Field Deployment of the Tethered Robotic eXplorer to Map Extremely Steep Terrain. Proceedings of the Conference on Field and Service Robotics (FSR). Springer Tracts in Advanced Robotics, 5, 303–317.
Bibtex source - McGarey, P., Yoon, D., Tang, T., Pomerleau, F., & Barfoot, T. D. (2018). Field Report: Developing and Deploying a Tethered Robot to Map Extremely Steep Terrain. Journal of Field Robotics, 35(8), 1327–1241.
Bibtex source
2017
- Pomerleau, F., & Kelly, J. (Eds.). (2017). Journal of Field Robotics (Vol. 34, Number 1, pp. 3–4).
Bibtex source - Paton, M., Pomerleau, F., MacTavish, K., Ostafew, C. J., & Barfoot, T. D. (2017). Expanding the Limits of Vision-based Localization for Long-term Route-following Autonomy. Journal of Field Robotics, 34(1), 98–122.
Bibtex source - Hitz, G., Galceran, E., Garneau, M.-È., Pomerleau, F., & Siegwart, R. (2017). Adaptive continuous-space informative path planning for online environmental monitoring. Journal of Field Robotics, 34(8), 1427–1449.
Bibtex source - McGarey, P., MacTavish, K., Pomerleau, F., & Barfoot, T. D. (2017). TSLAM: Tethered simultaneous localization and mapping for mobile robots. The International Journal of Robotics Research, 36(12), 1363–1386. https://doi.org/10.1177/0278364917732639
Publisher Bibtex source
2016
- Daoust, T., Pomerleau, F., & Barfoot, T. D. (2016). Light at the End of the Tunnel: High-Speed, Lidar-Based Train Localization in Challenging Underground Environments. Proceedings of the 13th Conference on Computer and Robot Vision (CRV). Best Robotic Vision Paper Award!
Bibtex source - Paton, M., Pomerleau, F., & Barfoot, T. D. (2016). In the dead of winter: Challenging vision-based path following in extreme conditions. Springer Tracts in Advanced Robotics, 113, 563–576.
Bibtex source - McGarey, P., Mactavish, K., Pomerleau, F., & Barfoot, T. D. (2016). The line leading the blind: Towards nonvisual localization and mapping for tethered mobile robots. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2016-June, 4799–4806.
Bibtex source - McGarey, P., Pomerleau, F., & Barfoot, T. D. (2016). System design of a tethered robotic explorer (TReX) for 3D mapping of steep terrain and harsh environments. Proceedings of the Conference on Field and Service Robotics (FSR). Springer Tracts in Advanced Robotics, 113, 267–281.
Bibtex source - Kubelka, V., Reinstein, M., & Svoboda, T. (2016). Improving multimodal data fusion for mobile robots by trajectory smoothing. Robotics and Autonomous Systems, 84, 88–96.
Bibtex source - Jirku, M., Kubelka, V., & Reinstein, M. (2016). WiFi localization in 3D. 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 4551–4557.
Bibtex source - Kruijff-Korbayová, I., Freda, L., Gianni, M., Ntouskos, V., Hlaváč, V., Kubelka, V., Zimmermann, E., Surmann, H., Dulic, K., Rottner, W., & others. (2016). Deployment of ground and aerial robots in earthquake-struck amatrice in italy (brief report). 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 278–279.
Bibtex source
2015
- Pomerleau, F., Colas, F., & Siegwart, R. (2015). A Review of Point Cloud Registration Algorithms for Mobile Robotics. Foundations and Trends in Robotics, 4(1), 1–104.
Bibtex source - Paton, M., Pomerleau, F., & Barfoot, T. D. (2015). Eyes in the Back of Your Head: Robust Visual Teach & Repeat Using Multiple Stereo Cameras. Proceedings of the 12th Conference on Computer and Robot Vision (CRV), 46–53.
Bibtex source - Krüsi, P., Bücheler, B., Pomerleau, F., Schwesinger, U., Siegwart, R., & Furgale, P. (2015). Lighting-invariant adaptive route following using iterative closest point matching. Journal of Field Robotics, 32(4), 534–564.
Bibtex source - Kubelka, V., Oswald, L., Pomerleau, F., Colas, F., Svoboda, T., & Reinstein, M. (2015). Robust data fusion of multimodal sensory information for mobile robots. Journal of Field Robotics, 32(4), 447–473.
Bibtex source - Hitz, G., Pomerleau, F., Colas, F., & Siegwart, R. (2015). State Estimation for Shore Monitoring Using an Autonomous Surface Vessel. Proceedings of the International Symposium on Experimental Robotics (ISER). Springer Tracts in Advanced Robotics, 745–760.
Bibtex source - Hitz, G., Pomerleau, F., Colas, F., & Siegwart, R. (2015). Relaxing the planar assumption: 3D state estimation for an autonomous surface vessel. International Journal of Robotics Research, 34(13), 1604–1621.
Bibtex source - Simanek, J., Reinstein, M., & Kubelka, V. (2015). Evaluation of the EKF-based estimation architectures for data fusion in mobile robots. IEEE/ASME Transactions on Mechatronics, 20(2), 985–990.
Bibtex source - Simanek, J., Kubelka, V., & Reinstein, M. (2015). Improving multi-modal data fusion by anomaly detection. Autonomous Robots, 39(2), 139–154.
Bibtex source
2014
- Furgale, P., Krüsi, P., Pomerleau, F., Schwesinger, U., Colas, F., & Siegwart, R. (2014). There and Back Again–-Dealing with highly-dynamic scenes and long-term change during topological/metric route following. In ICRA14 Workshop on Modelling, Estimation, Perception, and Control of All Terrain Mobile Robots.
Bibtex source - Pomerleau, F., Krüsi, P., Colas, F., Furgale, P., & Siegwart, R. (2014). Long-term 3D map maintenance in dynamic environments. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 3712–3719.
Bibtex source - Hitz, G., Gotovos, A., Pomerleau, F., Garneau, M.-E., Pradalier, C., Krause, A., & Siegwart, R. Y. (2014). Fully autonomous focused exploration for robotic environmental monitoring. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2658–2664.
Bibtex source - Kruijff, G. J. M., Kruijff-Korbayová, I., Keshavdas, S., Larochelle, B., Janíček, M., Colas, F., Liu, M., Pomerleau, F., Siegwart, R., Neerincx, M. A., Looije, R., Smets, N. J. J. M., Mioch, T., Van Diggelen, J., Pirri, F., Gianni, M., Ferri, F., Menna, M., Worst, R., … Hlaváč, V. (2014). Designing, developing, and deploying systems to support human-robot teams in disaster response. Advanced Robotics, 28(23), 1547–1570.
Bibtex source - Kruijff, G. J. M., Janíček, M., Keshavdas, S., Larochelle, B., Zender, H., Smets, N. J. J. M., Mioch, T., Neerincx, M. A., Diggelen, J. V., Colas, F., Liu, M., Pomerleau, F., Siegwart, R., Hlaváč, V., Svoboda, T., Petříček, T., Reinstein, M., Zimmermann, K., Pirri, F., … Sulk, M. (2014). Experience in system design for human-robot teaming in urban search and rescue. Proceedings of 8th International Conference on Field and Service Robotics (FSR), 92, 111–125.
Bibtex source - Kubelka, V., & Reinstein, M. (2014). Combining Complementary Motion Estimation Approaches to Increase Reliability in Urban Search & Rescue Missions. International Workshop on Modelling and Simulation for Autonomous Systems, 347–356.
Bibtex source
2013
- Pomerleau, F., Colas, F., Siegwart, R., & Magnenat, S. (2013). Comparing ICP variants on real-world data sets: Open-source library and experimental protocol. Autonomous Robots, 34(3), 133–148.
Bibtex source - Pomerleau, F. (2013). Applied Registration for Robotics: Methodology and Tools for ICP-like Algorithms [PhD thesis]. Eidgenössische Technische Hochschule (ETH) Zurich.
Bibtex source - Colas, F., Mahesh, S., Pomerleau, F., Liu, M., & Siegwart, R. (2013). 3D path planning and execution for search and rescue ground robots. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), 722–727. Best RoboCup Paper Award!
Bibtex source - Garneau, M.-È., Posch, T., Hitz, G., Pomerleau, F., Pradalier, C., Siegwart, R., & Pernthaler, J. (2013). Short-term displacement of \textitPlanktothrix Rubescens (cyanobacteria) in a pre-alpine lake observed using an autonomous sampling platform. Limnology and Oceanography, 58(5), 1892–1906.
Bibtex source - Reinstein, M., Kubelka, V., & Zimmermann, K. (2013). Terrain adaptive odometry for mobile skid-steer robots. 2013 IEEE International Conference on Robotics and Automation, 4706–4711.
Bibtex source
2012
- Pomerleau, F., Liu, M., Colas, F., & Siegwart, R. (2012). Challenging data sets for point cloud registration algorithms. International Journal of Robotics Research, 31(14), 1705–1711.
Bibtex source - Hitz, G., Pomerleau, F., Garneau, M.-E., Pradalier, C., Posch, T., Pernthaler, J., & Siegwart, R. Y. (2012). Autonomous inland water monitoring: Design and application of a surface vessel. IEEE Robotics and Automation Magazine, 19(1), 62–72.
Bibtex source - Stumm, E., Breitenmoser, A., Pomerleau, F., Pradalier, C., & Siegwart, R. (2012). Tensor-voting-based navigation for robotic inspection of 3D surfaces using lidar point clouds. International Journal of Robotics Research, 31(12), 1465–1488.
Bibtex source - Liu, M., Pradalier, C., Pomerleau, F., & Siegwart, R. (2012). The role of homing in visual topological navigation. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), 567–572.
Bibtex source - Liu, M., Pradalier, C., Pomerleau, F., & Siegwart, R. (2012). Scale-only visual homing from an omnidirectional camera. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 3944–3949.
Bibtex source - Liu, M., Pomerleau, F., Colas, F., & Siegwart, R. (2012). Normal estimation for pointcloud using GPU based sparse tensor voting. Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), 91–96.
Bibtex source - Liu, M., Colas, F., Pomerleau, F., & Siegwart, R. (2012). A Markov semi-supervised clustering approach and its application in topological map extraction. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), 4743–4748.
Bibtex source - Kubelka, V., & Reinstein, M. (2012). Complementary filtering approach to orientation estimation using inertial sensors only. 2012 IEEE International Conference on Robotics and Automation, 599–605.
Bibtex source - Gemme, S., Gingras, D., Salerno, A., Dupuis, E., Pomerleau, F., & Michaud, F. (2012). Pose Refinement Using ICP Applied to 3-D LIDAR Data for Exploration Rovers. Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space.
Bibtex source - Pomerleau, F., Breitenmoser, A., Liu, M., Colas, F., & Siegwart, R. (2012). Noise Characterization of Depth Sensors for Surface Inspections. Proceedings of the Applied Robotics for the Power Industry (CARPI).
Bibtex source
2011
- Pomerleau, F., Magnenat, S., Colas, F., Liu, M., & Siegwart, R. (2011). Tracking a depth camera: Parameter exploration for fast ICP. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), 3824–3829.
Bibtex source - Pomerleau, F., Lescot, B., Colas, F., Liu, M., & Siegwart, R. (2011). Dataset acquisitions for USAR environment: Vol. FS-11-05 (pp. 49–54). AAAI Fall Symposium - Technical Report.
Bibtex source - Sturm, J., Magnenat, S., Engelhard, N., Pomerleau, F., Colas, F., Cremers, D., Siegwart, R., & Burgard, W. (2011). Towards a benchmark for RGB-D SLAM evaluation. In Workshop on advanced reasoning with depth cameras at Robotics: Science and Systems (RSS).
Bibtex source - Gianni, M., Papadakis, P., Pirri, F., Liu, M., Pomerleau, F., Colas, F., Zimmermann, K., Svoboda, T., Petricek, T., Kruijff, G. J. M., Khambhaita, H., & Zender, H. (2011). A unified framework for planning and execution-monitoring of mobile robots: Vol. WS-11-09 (pp. 39–44). AAAI Workshop - Technical Report.
Bibtex source - Tâche, F., Pomerleau, F., Caprari, G., Siegwart, R., Bosse, M., & Moser, R. (2011). Three-dimensional localization for the MagneBike inspection robot. Journal of Field Robotics, 28(2), 180–203.
Bibtex source
2010
- Pomerleau, F., & Colas, F. (2010). Evaluation of stereo reconstruction for 3D mapping. 4th International Conference on Cognitive Systems (CogSys).
Bibtex source - Michaud, F., Boissy, P., Labonté, D., Brire, S., Perreault, K., Corriveau, H., Grant, A., Lauria, M., Cloutier, R., Roux, M.-A., Iannuzzi, D., Royer, M.-P., Ferland, F., Pomerleau, F., & Létourneau, D. (2010). Exploratory design and evaluation of a homecare teleassistive mobile robotic system. Mechatronics, 20(7), 751–766.
Bibtex source - Tâche, F., Pomerleau, F., Fischer, W., Caprari, G., Mondada, F., Moser, R., & Siegwart, R. (2010). MagneBike: Compact magnetic wheeled robot for power plant inspection. Proceedings of the 1st International Conference on Applied Robotics for the Power Industry (CARPI).
Bibtex source - Pomerleau, F., Colas, F., Ferland, F., & Michaud, F. (2010). Relative Motion Threshold for Rejection in ICP Registration. Proceedings of the Conference on Field and Service Robotics (FSR). Springer Tracts in Advanced Robotics, 62, 229–238.
Bibtex source
2009
- Triebel, R., Scaramuzza, D., Rufli, M., Spinello, L., Pomerleau, F., & Siegwart, R. (2009). Key Technologies for Intelligent and Safer Cars–from Motion Estimation to Predictive Motion Planning. In Workshop on Planning, Perception and Navigation for Intelligent Vehicles (PPNIV).
Bibtex source
2008
- Ferland, F., Pomerleau, F., Dinh, C. T. L., & Michaud, F. (2008). Egocentric and exocentric teleoperation interface using real-time, 3D video projection. Proceedings of the 4th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 37–44.
Bibtex source - Pomerleau, F. (2008). Registration algorithm optimized for simultaneous localization and mapping [Master's thesis]. Université de Sherbrooke.
Bibtex source