
Terrain awareness is an essential milestone to enable truly autonomous off-road navigation. Accurately predicting terrain characteristics allows optimizing a vehicle’s path against potential hazards. Recent methods use deep neural networks to predict traversability-related terrain properties in a self-supervised manner, relying on proprioception as a training signal. However, onboard cameras are inherently limited by their point-of-view relative to the ground, suffering from occlusions and vanishing pixel density with distance. This paper introduces a novel approach for self-supervised terrain characterization using an aerial perspective from a hovering drone. We capture terrain-aligned images while sampling the environment with a ground vehicle, effectively training a simple predictor for vibrations, bumpiness, and energy consumption. Our dataset includes 2.8 km of off-road data collected in forest environment, comprising 13 484 ground-based images and 12 935 aerial images. Our findings show that drone imagery improves terrain property prediction by 21.37 % on the whole dataset and 37.35 % in high vegetation, compared to ground robot images. We conduct ablation studies to identify the main causes of these performance improvements. We also demonstrate the real-world applicability of our approach by scouting an unseen area with a drone, planning and executing an optimized path on the ground.
Contributions
- A novel approach for self-supervised terrain prediction, leveraging an aerial viewpoint;
- An analysis of the improvements of using aerial imagery over ground-based cameras;
- A real-world demonstration of the potential of aerial scouting to plan missions ahead for UGVs.
Data Collection & Training
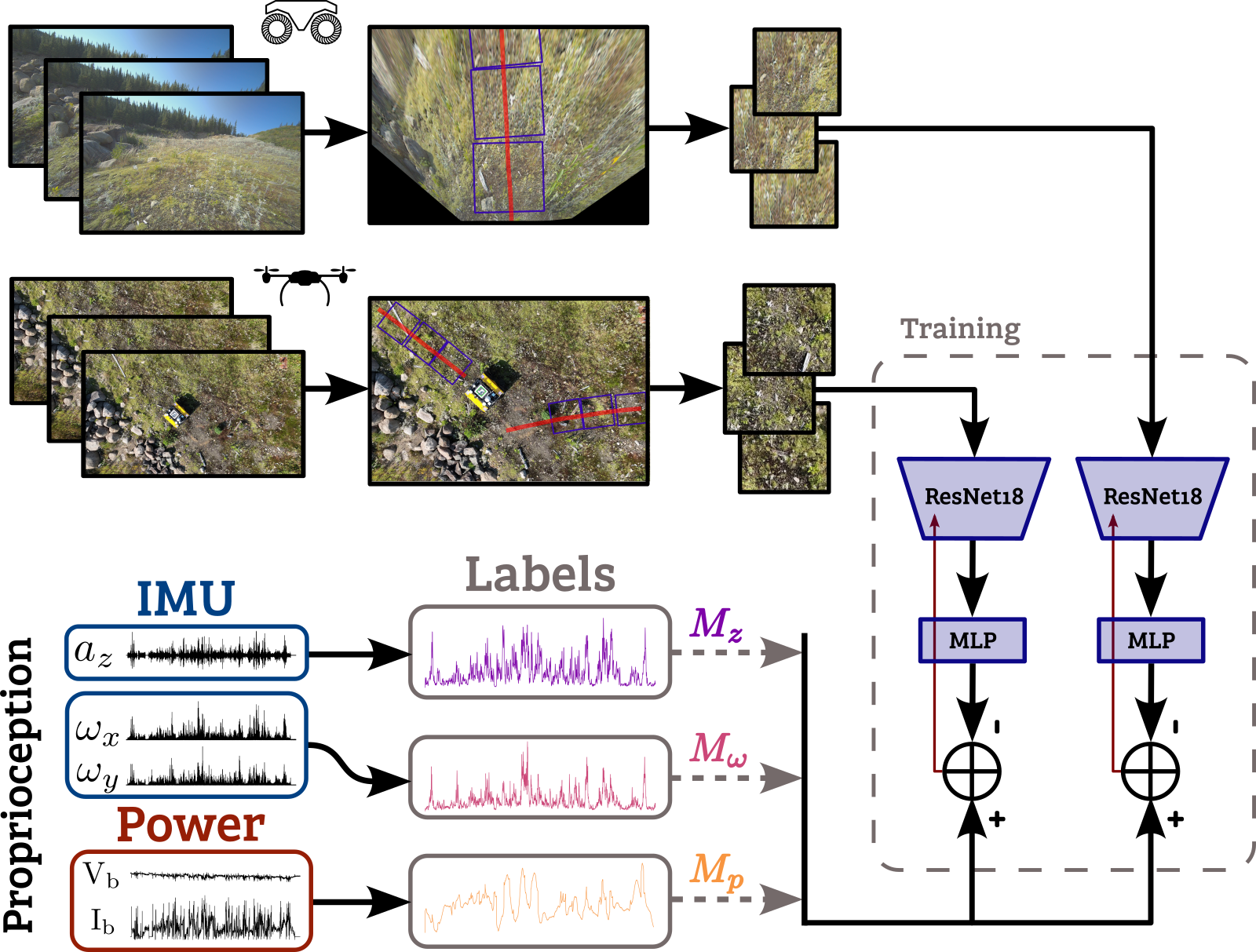
We simultaneously collect terrain imagery from two complementary viewpoints: an onboard camera mounted on the UGV captures first-person images, while a hovering UAV provides top-down aerial images. At the same time, the UGV’s proprioceptive sensors — IMU readings, wheel encoders, and motor current — record the vehicle’s physical response to the terrain it traverses. These proprioceptive measurements are used directly as self-supervised training labels, eliminating the need for manual annotation.
Results
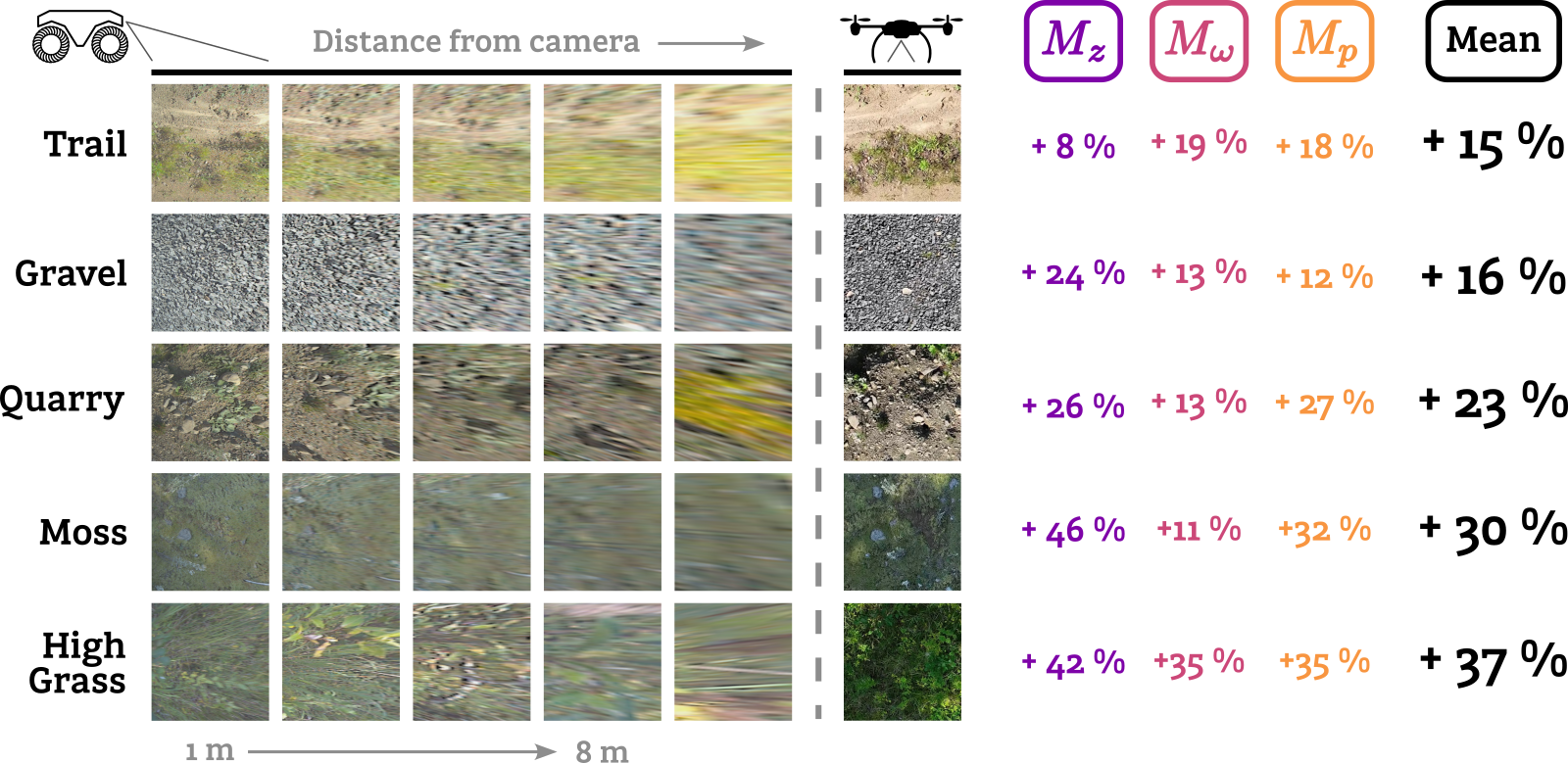
Aerial images consistently outperform onboard camera images for terrain property prediction. FPV images suffer from two compounding limitations: spatial resolution degrades quadratically with distance and tall vegetation frequently occludes the terrain ahead. The UAV, hovering at a fixed altitude, maintains a uniform ground sampling distance across the entire image. These advantages translate to a 21% reduction in prediction error on average, rising to 37% in high-vegetation areas.
Aerial Scouting
We demonstrate our approach on an unseen area of Université Laval’s campus. A drone surveys the terrain ahead, and our model produces traversability maps predicting vibration, bumpiness, and power consumption across the field. An optimal path is then computed from these maps and executed by the UGV — successfully avoiding a log pile, a puddle, and a large ground depression that caused the baseline shortest-path trajectory to struggle.
Reference
Fortin, J.-M., Gamache, O., Fecteau, W., Daum, E., Larrivée-Hardy, W., Pomerleau, F., & Giguère, P. (2025). UAV-Assisted Self-Supervised Terrain Awareness for Off-Road Navigation. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). https://doi.org/10.1109/ICRA55743.2025.11128050