![]()
Challenges inherent to autonomous wintertime navigation in forests include lack of a reliable Global Navigation Satellite System (GNSS) signal, low feature contrast, high illumination variations, and changing environment. This type of off-road environment is an extreme case of situations autonomous cars could encounter in northern regions. Thus, it is important to understand the impact of this harsh environment on autonomous navigation systems. To this end, we present a field report analyzing teach-and-repeat navigation in a subarctic forest while subject to fluctuating weather, including light and heavy snow, rain, and drizzle. First, we describe the system, which relies on point cloud registration to localize a mobile robot through a boreal forest, while simultaneously building a map. We experimentally evaluate this system in over 18.8km of autonomous navigation in the teach-and-repeat mode. Over 14 repeat runs, only four manual interventions were required, three of which were due to localization failure and another one caused by battery power outage. We show that dense vegetation perturbs the GNSS signal, rendering it unsuitable for navigation in forest trails. Furthermore, we highlight the increased uncertainty related to localizing using point cloud registration in forest trails. We demonstrate that it is not snow precipitation, but snow accumulation, that affects our system’s ability to localize within the environment. Finally, we expose some challenges and lessons learned from our field campaign to support better experimental work in winter conditions. Our dataset is available online.
Link to the paper
Quick facts
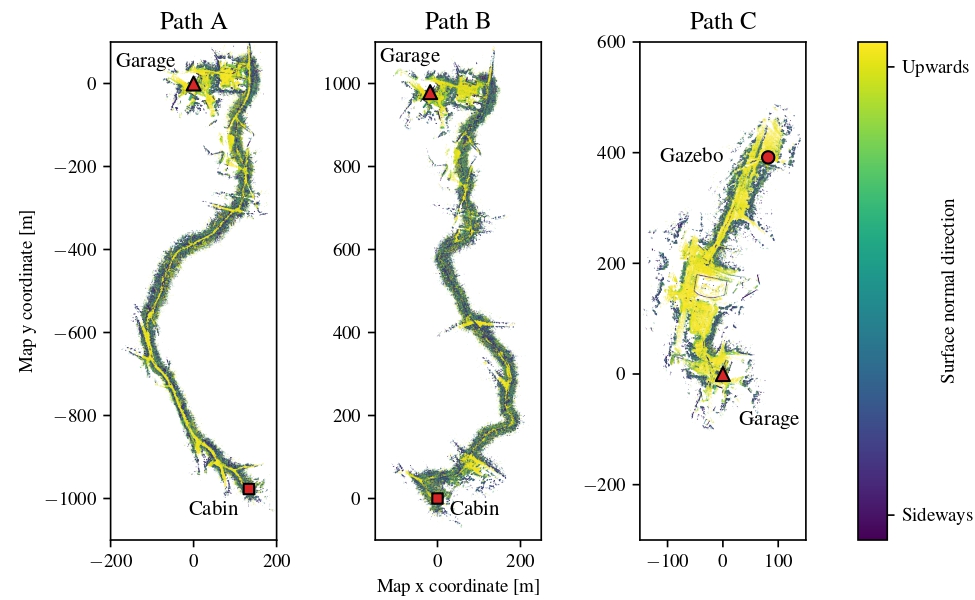
- 18.8 km of autonomous route repeating using a Clearpath Warthog
- The description of our Weather-Invariant Lidar-based navigation (WILN) system, relying on a Robosense RS-32 lidar and a XSens MTi-10 IMU for autonomous navigation.
- GNSS localization measurements using Emlid Reach-RS+ receivers.
- Deployment in the Montmorency subarctic forest, the largest research forest in the world harsh winter weather.
- We present a thorough analysis of the impact of the boreal forest biome and winter weather, inherent to northern countries on state-of-the-art autonomous navigation technologies.
- We highlight the upcoming challenges in enabling multi-season autonomy in northern territories.
- Any static equipment sinks in snow, thus requiring significant effort and potentially fixed structures.
- Deep snow significantly affects UGV mobility, motivating more research on immobilization prevention and recovery for robot operations spanning multiple seasons in forest environments.
- Winter weather disrupts battery capicity, which should be taken into account for winter mission planning.
- Resiliency to illumunation variance is key to deploying mobile robots in northern environments, as pitch-black conditions are frequent, especially in wintertime.
- Multiseasonal changes are major in boreal forests, leading to failure for state-of-the-art autonomous navigation systems.
- Our dataset is available to the community, you can access it here.