
Welcome to the site of the Northern Robotics Laboratory (norlab) at Université Laval. Our research laboratory is specialized in mobile and autonomous systems working in northern or difficult conditions. We aim at investigating new challenges related to navigation algorithms to push the boundary of what is currently possible to achieve with a mobile robot in real-life conditions. The current focus of the laboratory is on localization algorithms designed for laser sensors (lidar) and 3D reconstruction of the environment. We will use this website to showcase our results and to simplify the knowledge transfer with some general tips & tricks.
News
:

The FoMo dataset is available!
FoMo is a multi-season collection recorded in a boreal forest environment, featuring deep snow, off-road terrain, steep slopes, and highly variable weather. ...
:

Norlab heads to Nunavut in March 2026 to assess Arctic challenges ↗
This page redirects to the original article on Eye on the Arctic page.
:

We are co-organizing a workshop on Field Robotics at ICRA2024 !
Find all the information here: link to the website
:
A national award for a member of Norlab!
Congratulation to François Pomerleau for receiving the 2022 Outstanding Early Career Computer Science Researcher Award from CS-Can | Info-Can, the Canadian S...
Research
:
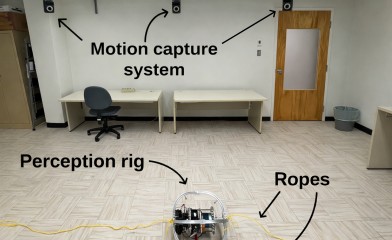
High-Resolution Motion Capture (HRMC) Dataset
The HRMC dataset provides high-frequency ground-truth motion data, capturing the full 6-degree-of-freedom (6-DoF) pose of the system over time. This includes...
:

CRYOTIC
The Challenging Robotics in Year-round, Outdoor, and Time-critical missions In extreme Conditions (CRYOTIC) project aims to develop resilient autonomous navi...
:
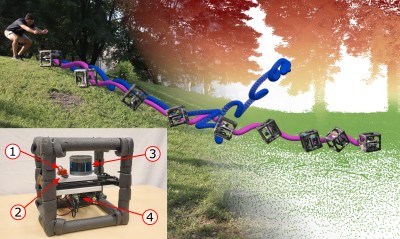
Tumbling-Induced Gyroscope Saturation (TIGS) Dataset
The TIGS dataset is designed to help researchers understand how sensors behave in extreme, real-world motion. It contains data recorded from a mechanical LiD...
:
FOMO - A Proposal for a Multi-Season Dataset for Robot Navigation in Forêt Montmorency
In this paper, we propose the FoMo (Forêt Montmorency) dataset: a comprehensive, multi-season data collection. Located in the Montmorency Forest, Quebec, Can...
Publications
:

Toward Teach and Repeat Across Seasonal Deep Snow Accumulation
Download article Visit FoMo page We deployed again to Forêt Montmorency in March 2025. With over 1 m of snow accumulation, it was a perfect time to st...
:
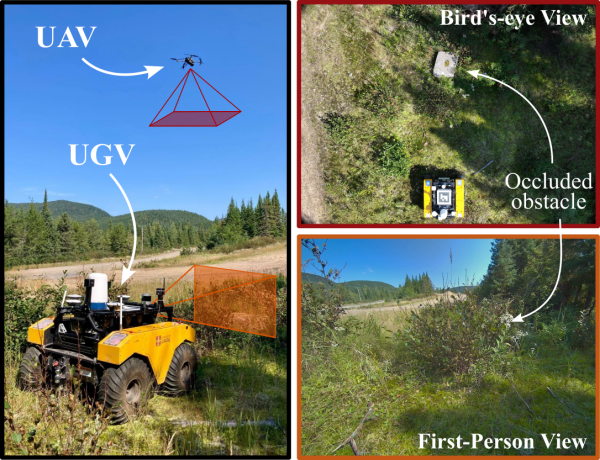
UAV-Assisted Self-Supervised Terrain Awareness for Off-Road Navigation
Paper Link
:

Exposing the Unseen: Exposure Time Emulation for Offline Benchmarking of Vision Algorithms
Download article Visit GitHub page
:
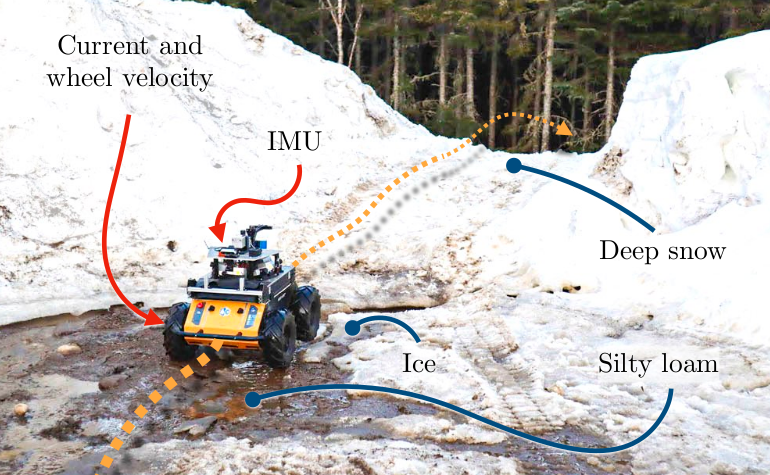
Proprioception Is All You Need: Terrain Classification for Boreal Forests
Webpage ArXiv preprint Slides Cite this