In a context of autonomous robots, one of the most important tasks is to ensure the safety of the robot and its surrounding. The risk of navigation is usually said to be the probability of collision. This notion of risk is not well defined in the literature, especially when dealing with occupancy grids. The Bayesian occupancy grid is the most used method to deal with complex environments. However, this is not fitted to compute the risk along a path by its discrete nature. In this article, we present a new way to store the occupancy of the environment that allows the computation of risk along a given path. We then define the risk as the force of collision that would occur for a given obstacle. Using this framework, we are able to generate navigation paths ensuring the safety of the robot.
Contributions
- A novel type of map, called Lambda-Field, specially conceived to allow path integrals and thus probabilities of collision;
- A definition of the risk encountered over a path, specified as the expected force of collision along a path.
Results in Images
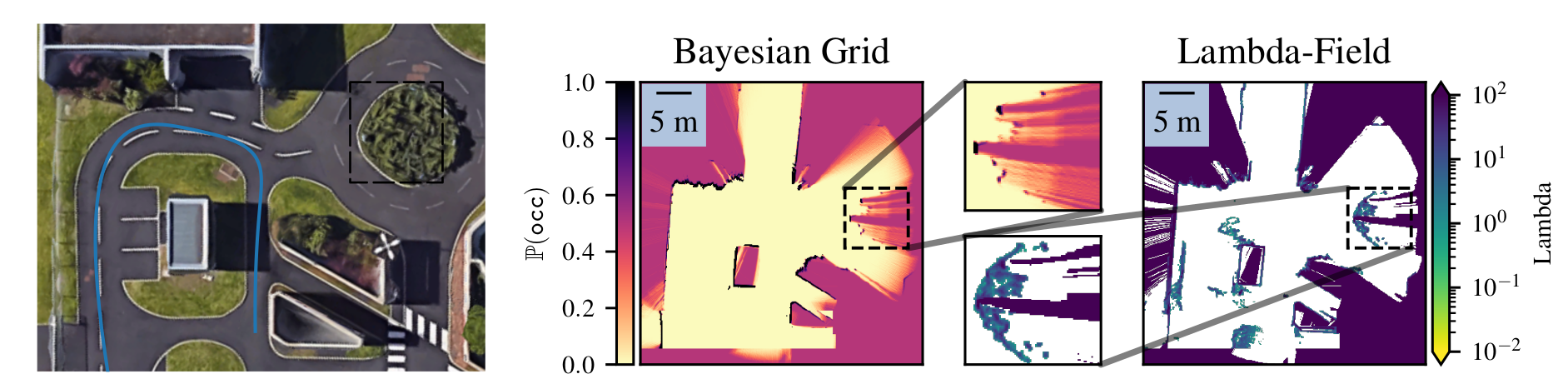
Using the lambda-field, we are able to construct maps where the probability of collision along a path logically arises from the theory.
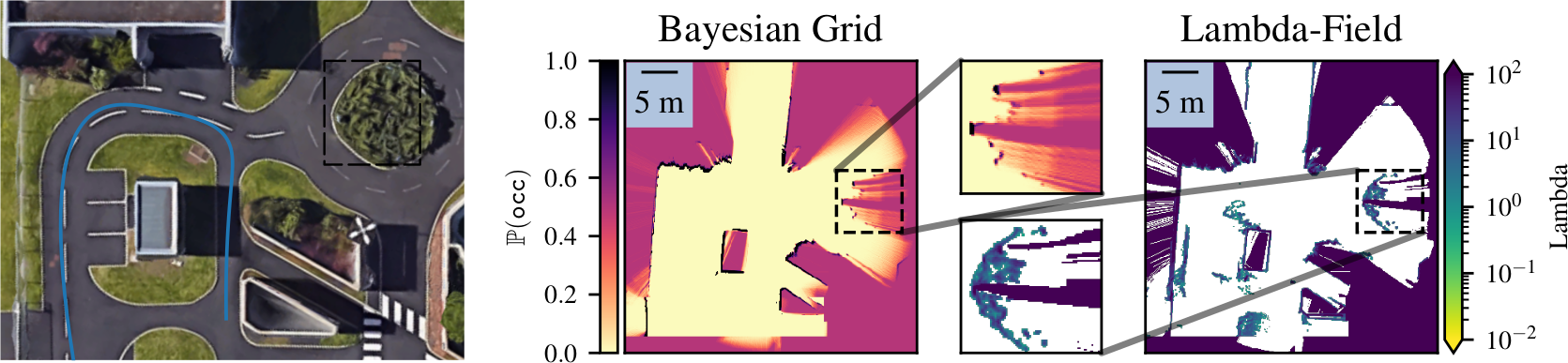
The robot (trajectory in blue) maps an urban-like environment and creates a Bayesian Grid as well as a Lambda-Field. Although the maps are almost the same, the Lambda-Field tends to better store the unstructured obstacles (bushes in this example).
In Video
Reference
Laconte, J., Debain, C., Chapuis, R., Pomerleau, F., & Aufrere, R. (2019). Lambda-Field: A Continuous Counterpart of the Bayesian Occupancy Grid for Risk Assessment. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS).