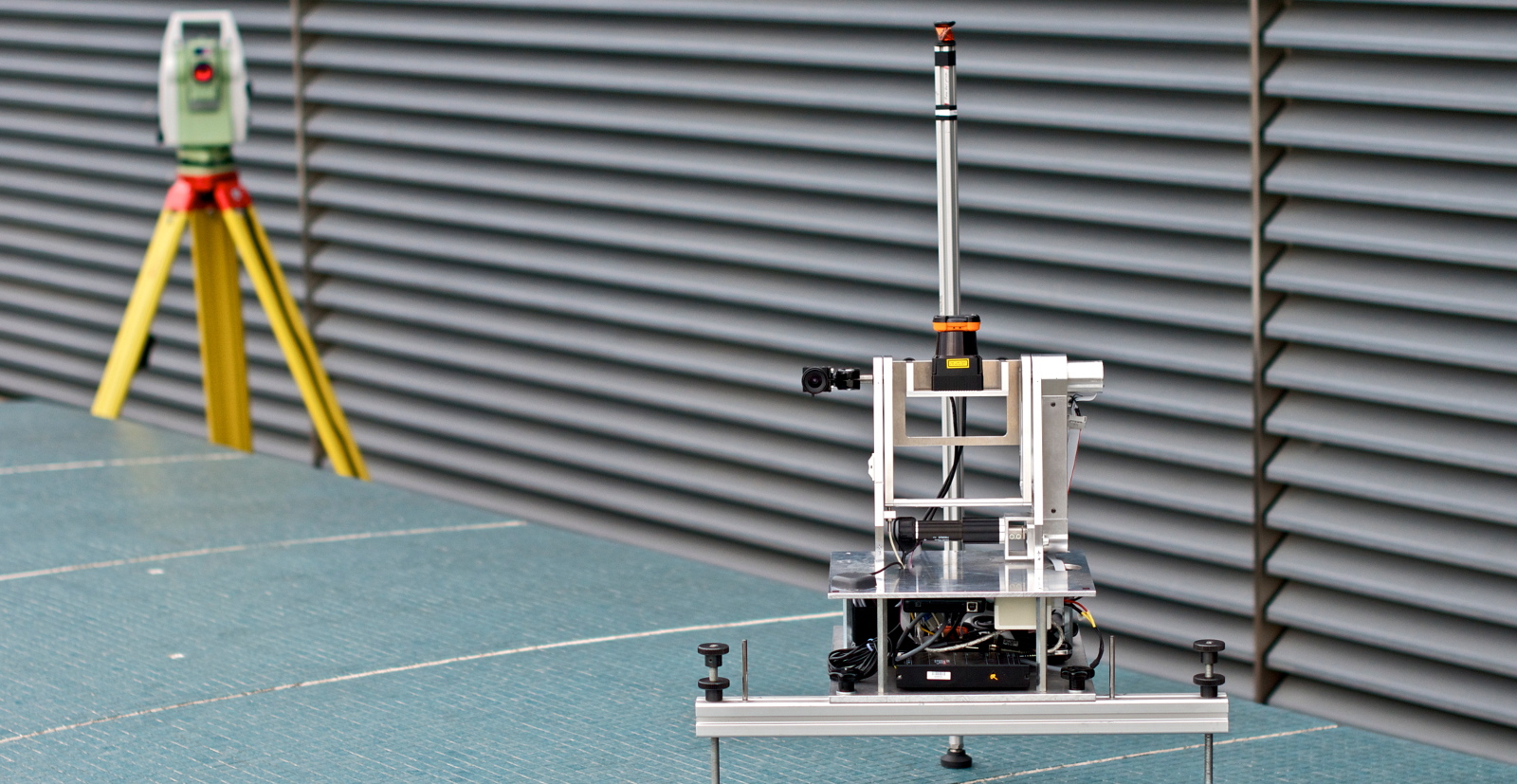
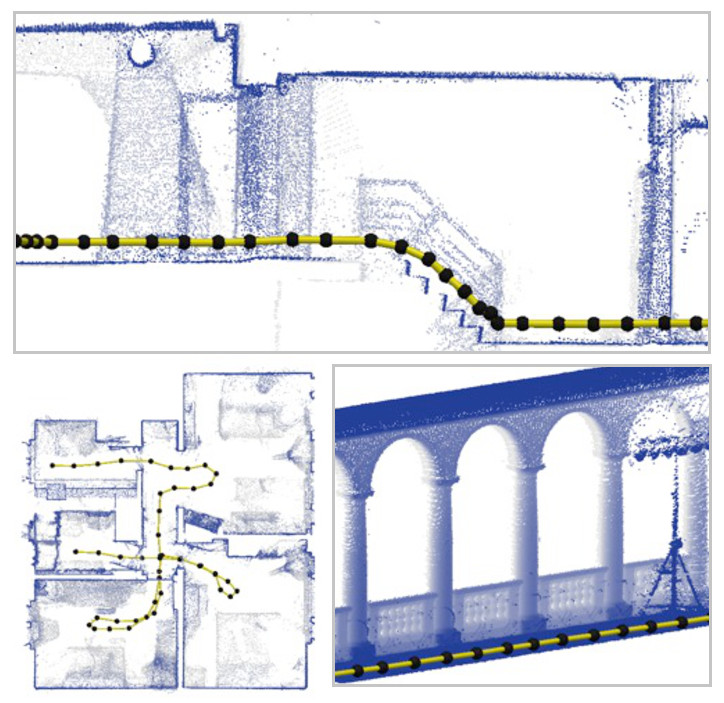
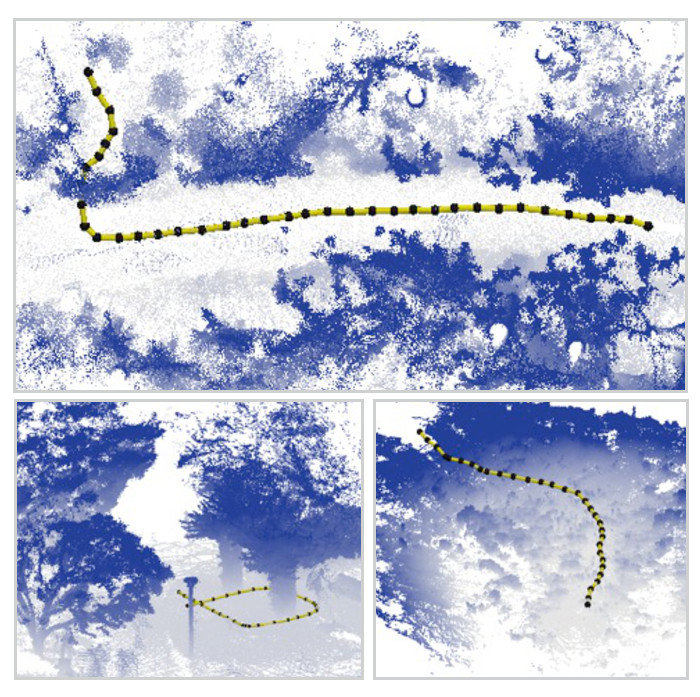
This group of datasets was recorded with the aim to test point cloud registration algorithms in specific environments and conditions. Special care is taken regarding the precision of the “ground truth” positions of the scanner, which is in the millimeter range, using a theodolite. Some examples of the recorded environments can be seen bellow.
Contributions
- Ground truth localization of the point clouds in the order of millimeters
- Structured, semi-structures, and unstructured environments
- Seasonal and dynamic changes
Results in Images
If you’re curious about what those images represent, then you should read the full paper.

Reference
(missing reference)