
Bienvenue sur le site du Laboratoire de robotique boréale (norlab) de l'Université Laval. Notre laboratoire de recherche est spécialisé en systèmes mobiles et autonomes fonctionnant en conditions nordiques ou difficiles en général. Nous visons l'étude de problèmes reliés au algorithmes de navigation dans l'optique de repousser les limites de ce qui est présentement possible de faire avec un robot mobile en conditions d'utilisations réelles. Présentement, nos efforts sont dirigés vers les algorithmes de localisation basés sur les capteurs laser (lidar) et sur la reconstruction 3D d'environnements. Nous utiliserons ce site web afin de présenter nos résultats de recherche et de simplifier le transfert de connaissances grâce à des trucs et conseils généraux.
Nouvelles
:

We are co-organizing a workshop on Field Robotics at ICRA2024 !
(Seulement en anglais) Find all the information here: link to the website
:
A national award for a member of Norlab!
(Seulement en anglais) Congratulation to François Pomerleau for receiving the 2022 Outstanding Early Career Computer Science Researcher Award from CS-Can | Info-Can, the Canadian S...
:

Quatre stages en robotique pour l'été 2021 tous pris!
Norlab ouvre quatre stages couvrant plusieurs domaines d’étude cet été. Appliquez aussitôt que vous pouvez car les offres se terminent sous peu. Voici la lis...
Publications
:

Exposing the Unseen: Exposure Time Emulation for Offline Benchmarking of Vision Algorithms
(Seulement en anglais) Download article Visit GitHub page
:
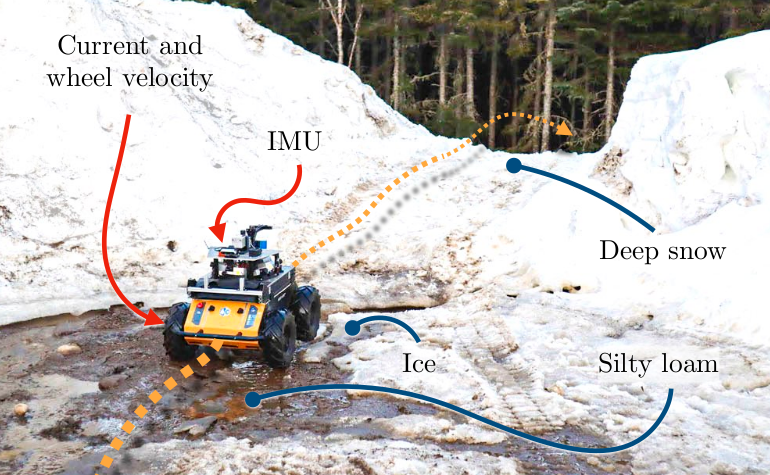
Proprioception Is All You Need: Terrain Classification for Boreal Forests
(Seulement en anglais) Webpage ArXiv preprint Slides Cite this
:
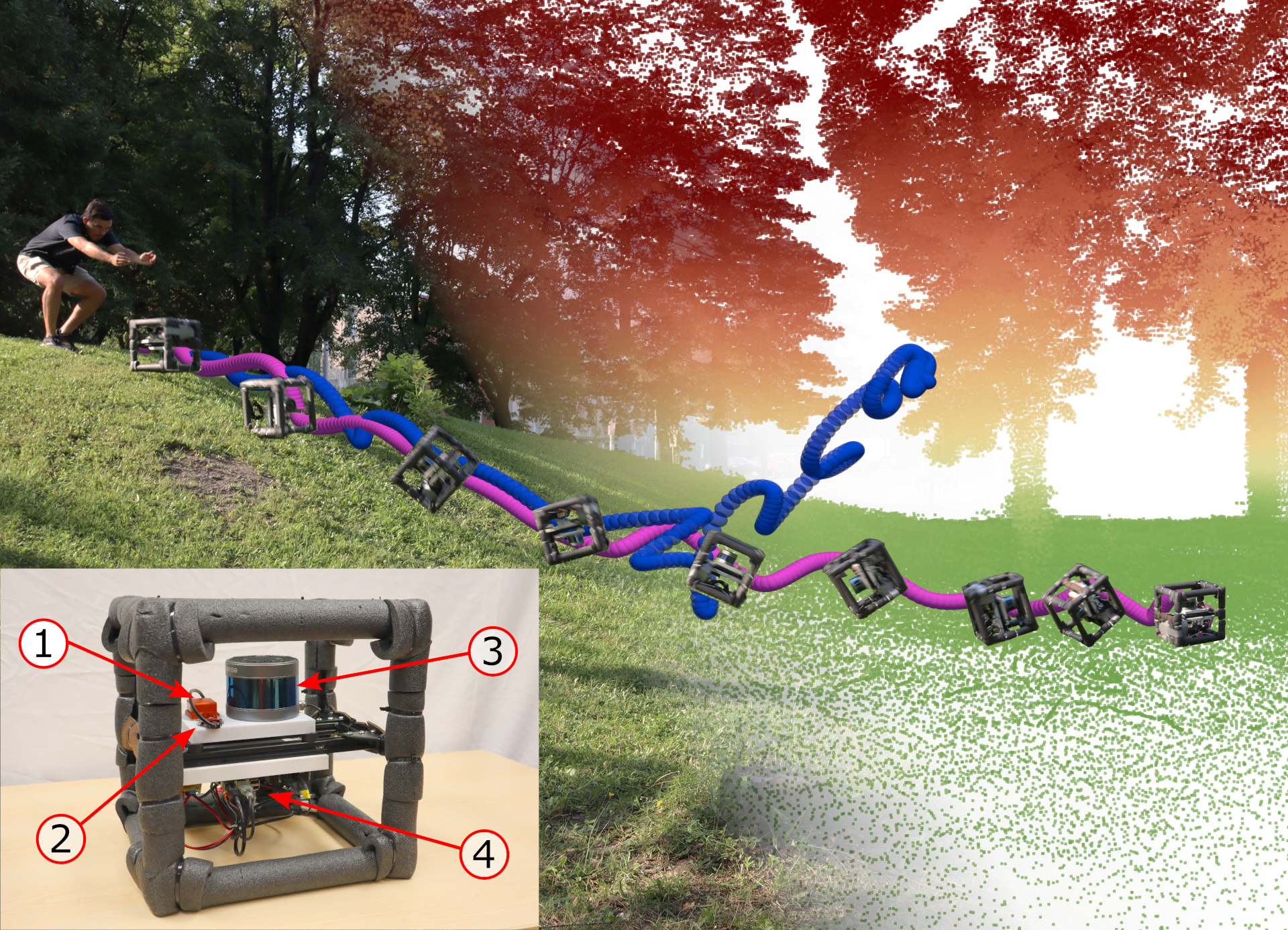
Saturation-Aware Angular Velocity Estimation: Extending the Robustness of SLAM to Aggressive Motions
(Seulement en anglais) We propose a novel angular velocity estimation method to increase the robustness of Simultaneous Localization And Mapping (SLAM) algorithms against gyroscope...
:
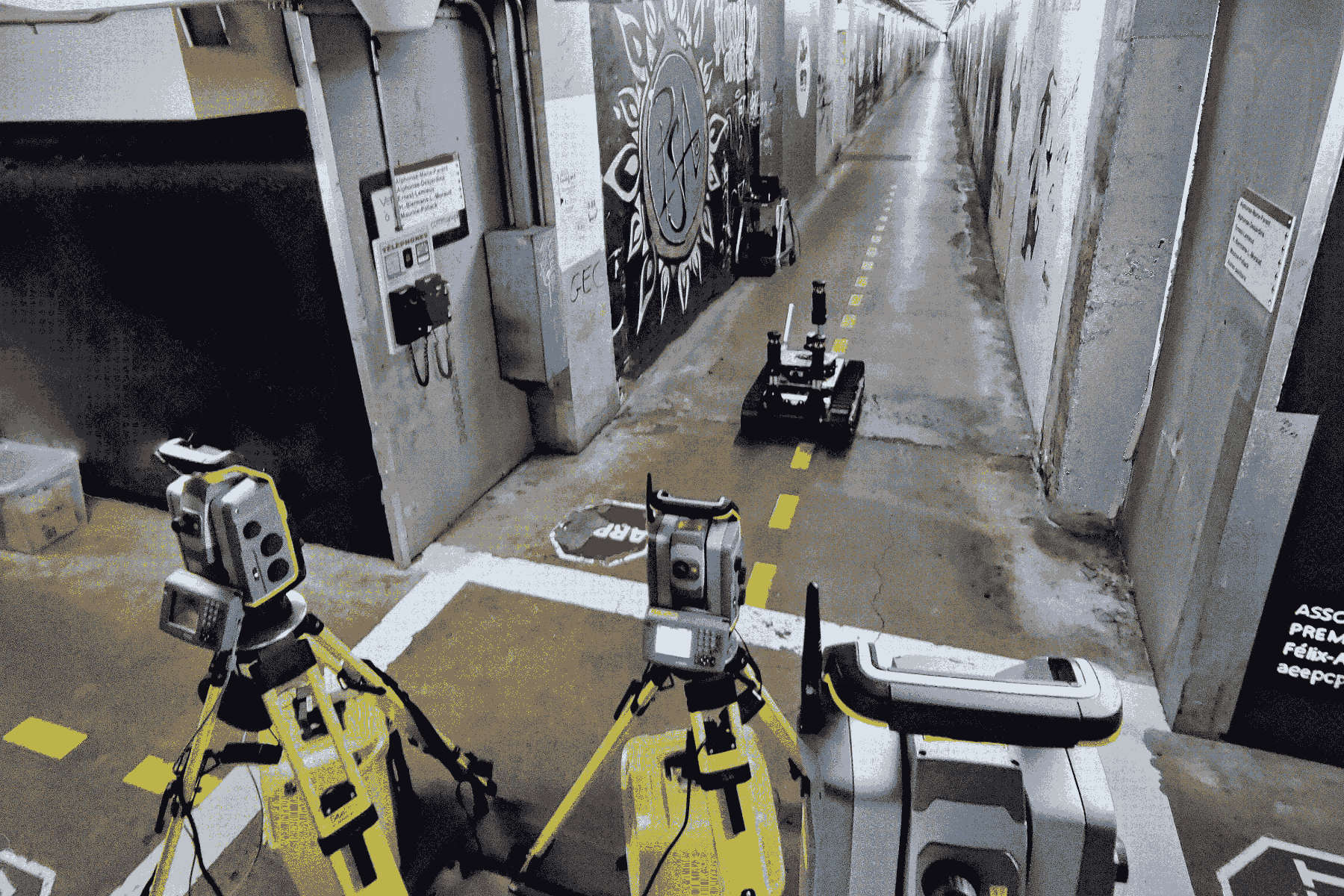
Extrinsic calibration for highly accurate trajectories reconstruction
(Seulement en anglais) In the context of robotics, accurate ground-truth positioning is the cornerstone for the development of mapping and localization algorithms. In outdoor envir...