
Welcome to the site of the Northern Robotics Laboratory (norlab) at Université Laval. Our research laboratory is specialized in mobile and autonomous systems working in northern or difficult conditions. We aim at investigating new challenges related to navigation algorithms to push the boundary of what is currently possible to achieve with a mobile robot in real-life conditions. The current focus of the laboratory is on localization algorithms designed for laser sensors (lidar) and 3D reconstruction of the environment. We will use this website to showcase our results and to simplify the knowledge transfer with some general tips & tricks.
News
:

We are co-organizing a workshop on Field Robotics at ICRA2024 !
Find all the information here: link to the website
:
A national award for a member of Norlab!
Congratulation to François Pomerleau for receiving the 2022 Outstanding Early Career Computer Science Researcher Award from CS-Can | Info-Can, the Canadian S...
:

Four internships in robotics for the summer 2021 all taken!
Norlab is opening four internships covering multiple fields of study for this summer. Apply as soon as you can, we are closing the openings soon. Here is the...
:
New Year 2021 brought us the ROSA project
In the beginning of this year, we have started working with the industrial partner Hydro-Quebec on the new project ROSA (Robot Optimizations for Surveillance...
Research
:
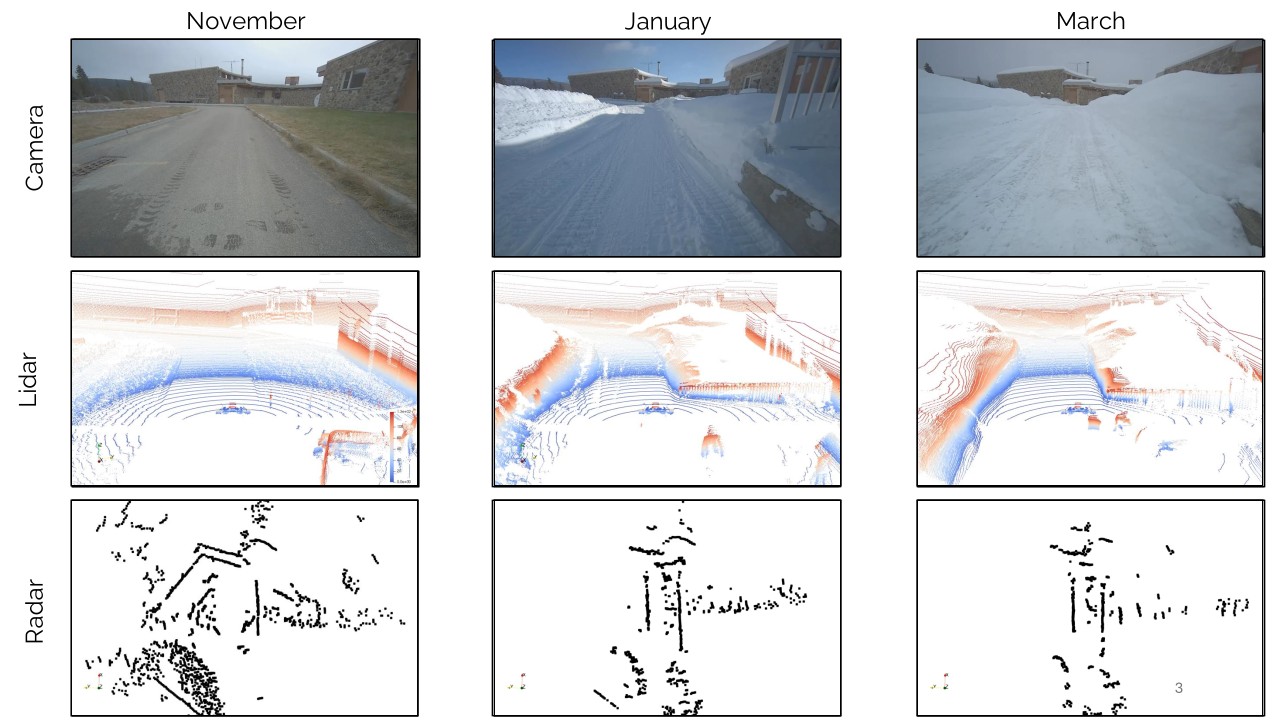
FOMO - A Proposal for a Multi-Season Dataset for Robot Navigation in Forêt Montmorency
In this paper, we propose the FoMo (Forêt Montmorency) dataset: a comprehensive, multi-season data collection. Located in the Montmorency Forest, Quebec, Can...
:

BorealHDR Dataset
This repository contains the code used in our paper Exposing the Unseen: Exposure Time Emulation for Offline Benchmarking of Vision Algorithms accepted at IR...
:

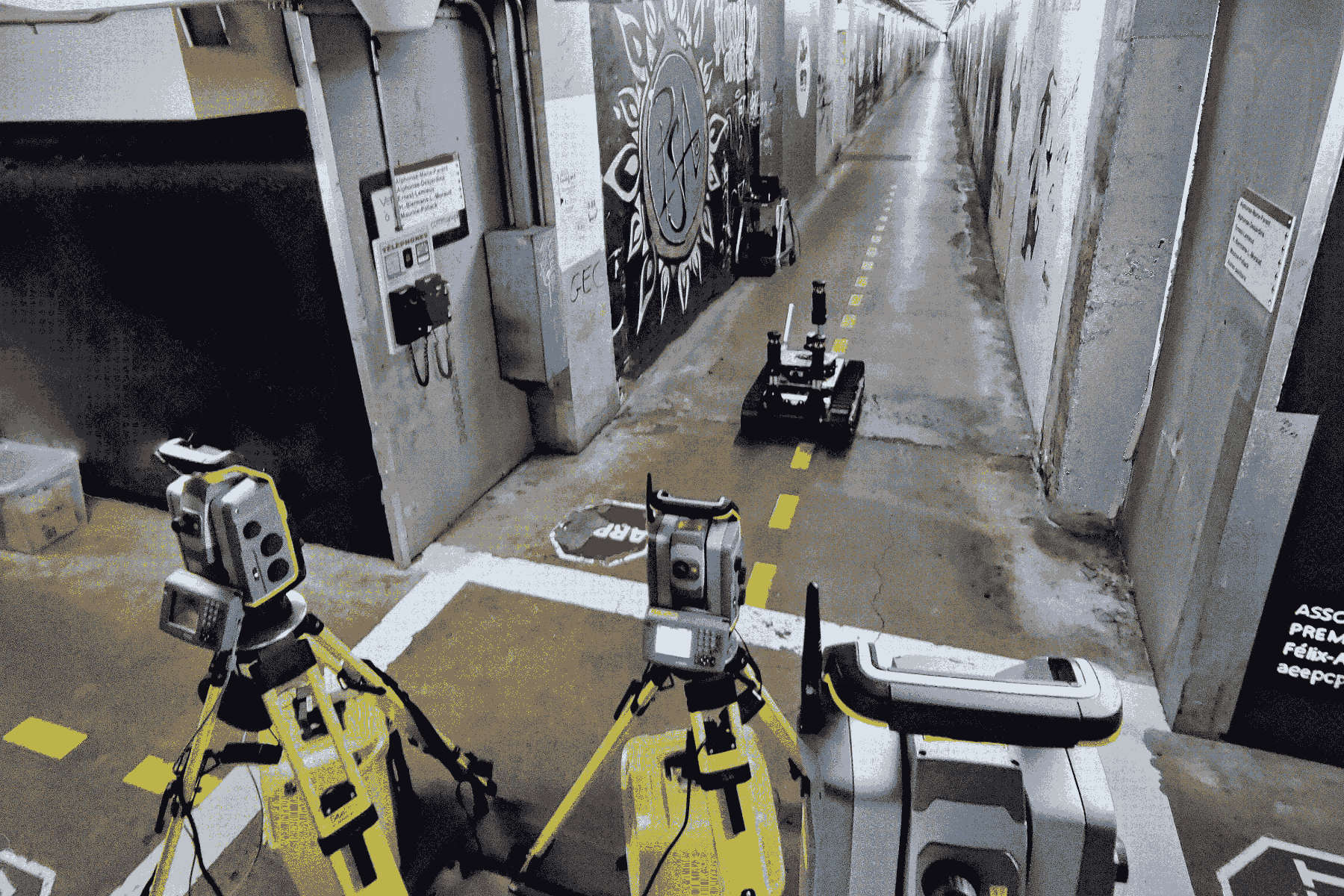
RTS‐GT Dataset
This page gives a description about the RTS-GT Dataset. The following table describes the deployment done with some characteristics which are the prism data ...
:

DRIVE Datasets
This page is dedicated to sharing our datasets for our paper entitled “DRIVE: Data-driven Robot Input Vector Exploration”. The datasets for each experiment ...
Publications
:

Exposing the Unseen: Exposure Time Emulation for Offline Benchmarking of Vision Algorithms
Download article Visit GitHub page
:
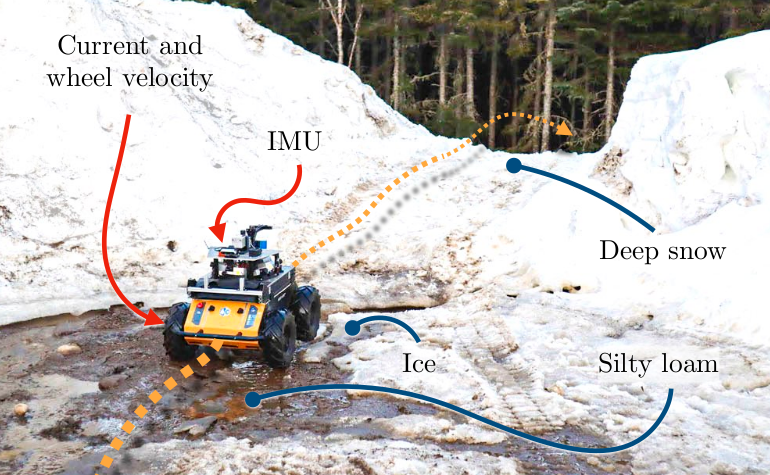
Proprioception Is All You Need: Terrain Classification for Boreal Forests
Webpage ArXiv preprint Slides Cite this
:
Saturation-Aware Angular Velocity Estimation: Extending the Robustness of SLAM to Aggressive Motions
We propose a novel angular velocity estimation method to increase the robustness of Simultaneous Localization And Mapping (SLAM) algorithms against gyroscope...
:
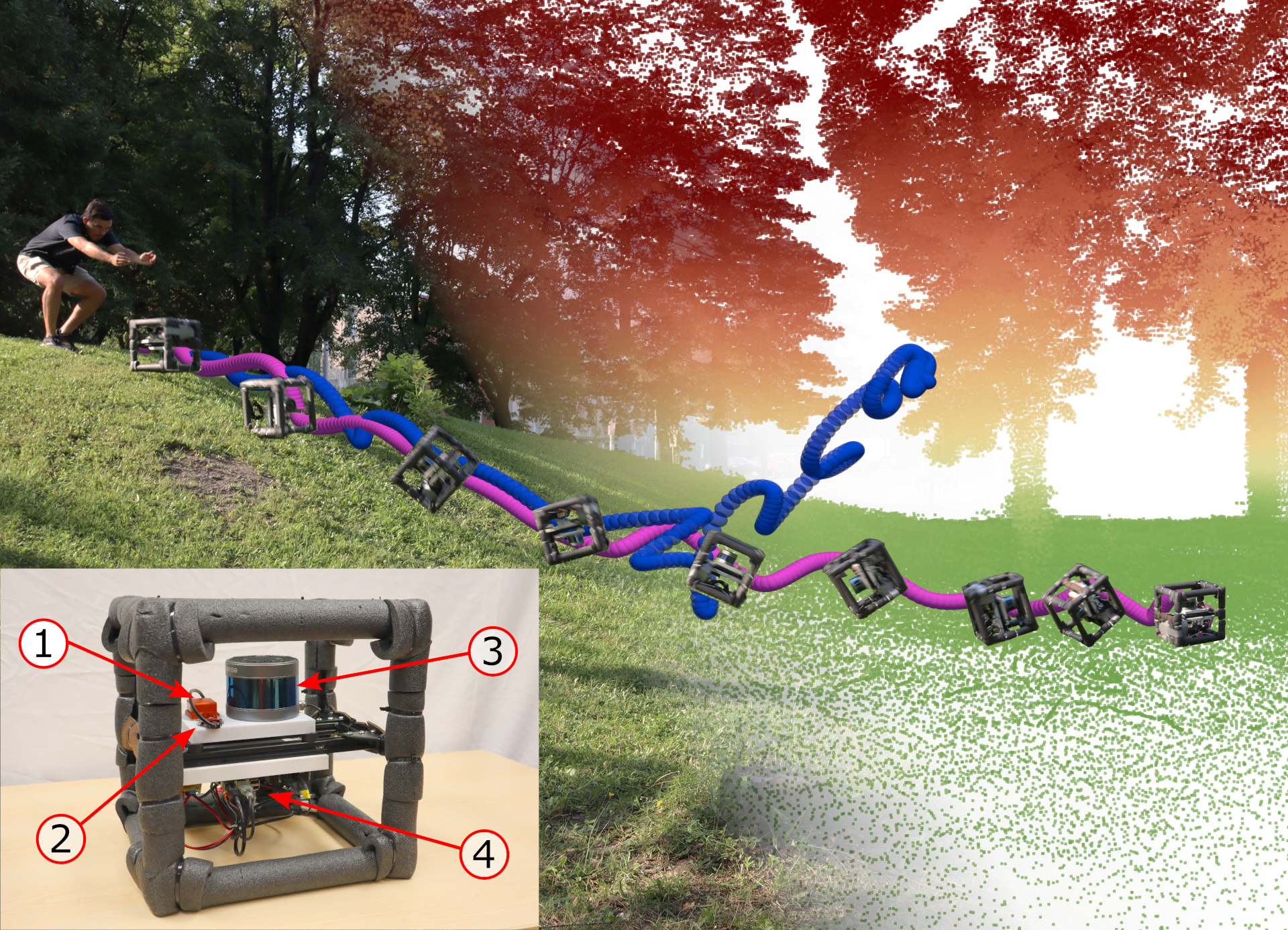
Extrinsic calibration for highly accurate trajectories reconstruction
In the context of robotics, accurate ground-truth positioning is the cornerstone for the development of mapping and localization algorithms. In outdoor envir...