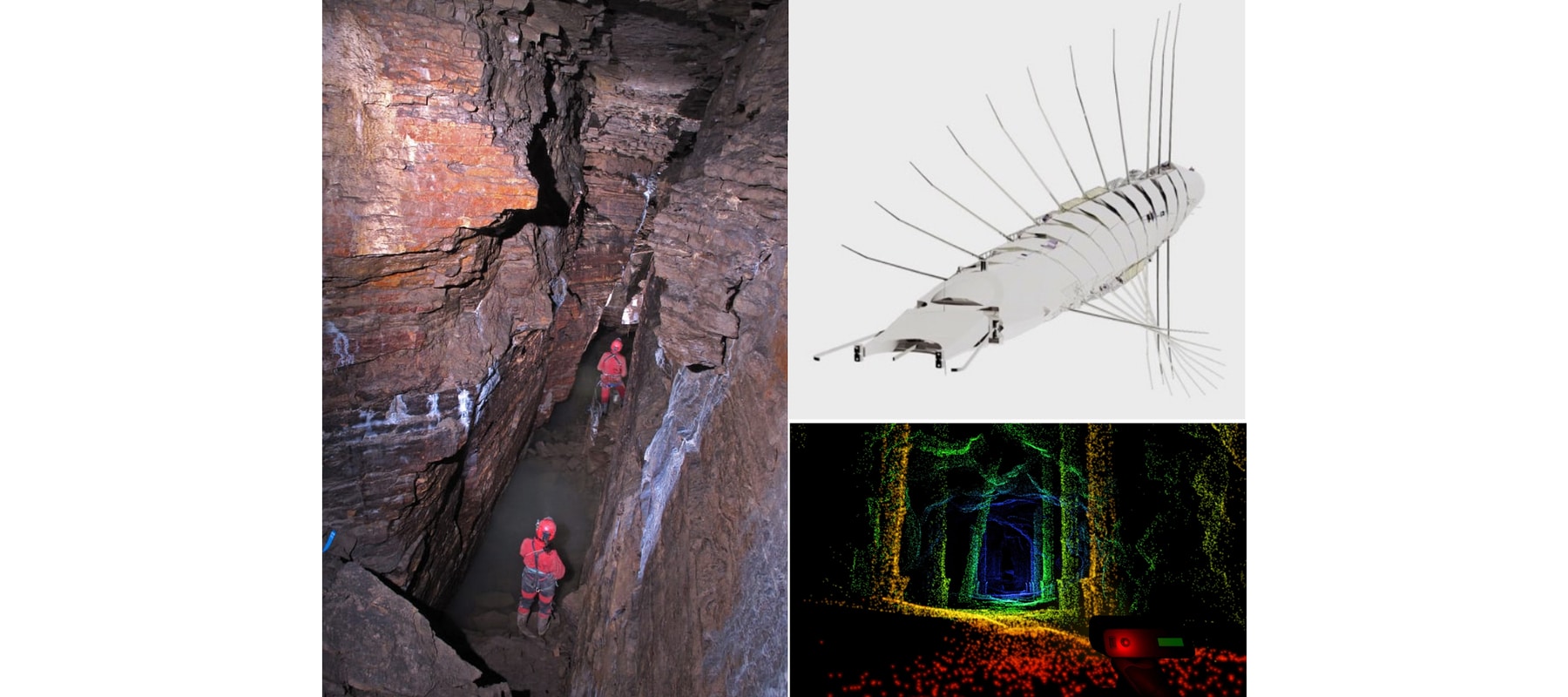
L’exploration de larges cavernes en utilisant les outils classiques de scan 3D est toujours un veritable défi. L’espace est assez limité pour permettre l’installation de tripodes équipés de Lidar (Technologie de mesure de distance et détection par laser) haute précision, et les drones (quadromoteurs par exemples) pausent problèmes dans ces endroits étroits du fait des turbulences dans l’air qu’ils causent via les parois rocheuses, ainsi que de leur faible autonomie de batterie. C’est pourquoi ce projet a pour but de développer l’utilisation d’un dirigeable semi-rigide (du type mini-zepplin ou ballon gonflé à l’hélium) afin d’aider à l’observation de ces larges environnements souterrains.
Plus précisement, le but de ces recherches est d’explorer différentes solutions de scan 3D pour des véhicules volants avec des contraintes de charge matériel. Ce véhicule volant est actuellement en cours de développement par NXI Gestatio [Reeves|St-Onge] (Prof. Reeves, UQAM), avec l’intention de pouvoir y ajouter des capteurs de distance dessus afin de reconstruire son environnement en 3D. Ceci est une extension d’un ancien projet utilisant des cubes gonflés à l’hélium en vue d’une représentation artistique (St-Onge et al., 2017), dans lequel une démonstration de cette technologie dans de larges cavernes avait déjà été envisagé. Le laboratoire Norlab aura comme responsabilité l’exploration de solution robuste pour la perception en 3D d’environnement souterrrain menant à des problèmes d’incertitude de positionnement du robot mais également de précision des mesures.
L’algorithme de reconstrution d’environnement se basera sur la librairie en C++ libpointmatcher, étant une librairie modulable contenant de multiples algorithmes de reconstrution de nuage de point et étant actuellement utilisée dans de multiples projets de recherche à travers le monde. Cette librairie est actuellement mise à jour et développée par le laboratoire Norlab afin d’explorer différents environnement pour le scan 3D (missing reference). Dépendament de la vitesse de déplacement entre le robot et le capteur 3D Lidar, des solutions de reconstruction de trajectoire en 3D pourront être envisagées (Zhang & Singh, 2015). Le prototype final sera testé dans des cavernes naturelles, comme par exemple celle nouvellement découverte à Montréal, la caverne St-Leonard. Récemment, les spéléologues y ont découvert une nouvelle chambre mesurant pas moins de 250 mètres de long et étant difficile d’accès.
Team
- Chercheur principal: Nicolas Reeves
- Coordonateur et chef du design méchanique: David St-Onge
- Chef Scientifique - cartographie 3D: François Pomerleau
- Chercheur - cartographie 3D: Maxime Vaidis
Référence
- St-Onge, D., Brèches, P.-Y., Sharf, I., Reeves, N., Rekleitis, I., Abouzakhm, P., Girdhar, Y., Harmat, A., Dudek, G., & Giguère, P. (2017). Control, localization and human interaction with an autonomous lighter-than-air performer. Robotic and Autonomous Systems, 88, 165–186.
Bibtex source - Zhang, J., & Singh, S. (2015). LOAM: Lidar odometry and mapping in real-time. IEEE Transactions on Robotics, 32(7), 141–148.
Bibtex source