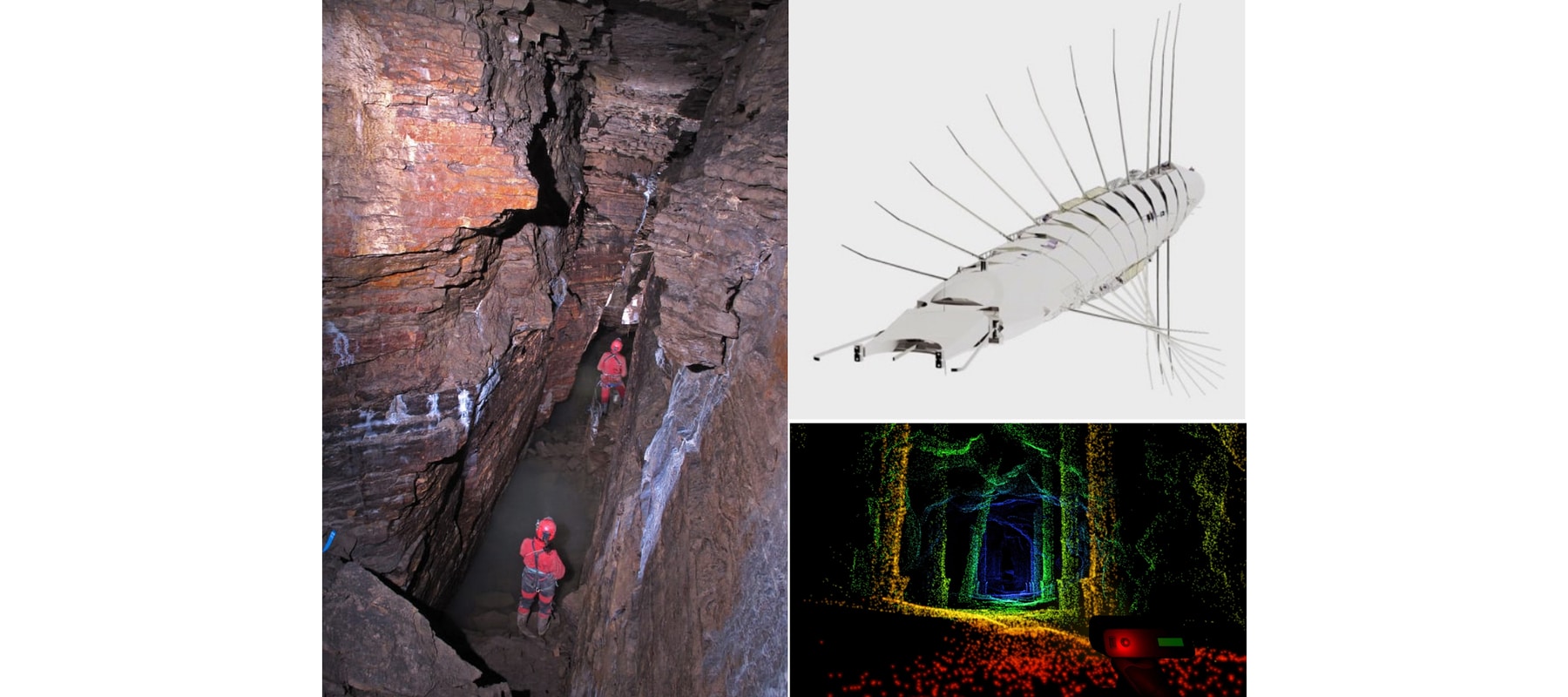
Exploration of large caves is challenging using traditional mapping tools. There are limited places to install a tripod equipped with a highly accurate lidar (Light Detection And Ranging) and flying drones (i.e., quadrotors) in tight environments causes trouble with air disturbances produced by surrounding walls, along with their limited battery time. This project investigate the use of a semi-rigid airship (e.g., Zeppelin or blimp) to support geological observations of large underground environments.
More precisely, the goal of this project is to investigate different 3D mapping solutions for a flying vehicle with a limited payload. The flying vehicle is currently being built by NXI Gestatio [Reeves|St-Onge] (Prof. Reeves, University of Quebec at Montreal), with the intention to install 3D sensors allowing the robot to reconstruct its environment in 3D. It is the extension of a formal project using blimps in an artistic context (St-Onge et al., 2017), where a demonstration of the technology in a large cave trigged further research interests. The Northern Robotics Laboratory will be responsible to investigate 3D perception solutions robust to underground environmental conditions leading to the uncertainty of the robot pose and to mapping the caves with enough accuracy.
The mapping algorithms will be based on the C++ library libpointmatcher, a modular library containing multiple algorithms used inside registration algorithms and currently used in multiple research projects around the world. This library is currently maintained and developed by Norlab to investigate different conditions for 3D mapping (missing reference). Depending on the speed ratio between the robot and the 3D scanner, solutions along smooth 3D trajectory reconstruction (Zhang & Singh, 2015) is expected. The final prototype will be tested in a real cave, which could be the newly discovered cave of St-Leonard. Recently, spelunkers discovered a new chamber in this cave measuring 250-metres long that is difficult to explore and raising scientific interests.
Team
- Principal Investigator: Nicolas Reeves
- Coordinator and Mechanical Design Lead: David St-Onge
- Scientific Lead - 3D mapping: François Pomerleau
- Researcher - 3D mapping: Maxime Vaidis
References
- St-Onge, D., Brèches, P.-Y., Sharf, I., Reeves, N., Rekleitis, I., Abouzakhm, P., Girdhar, Y., Harmat, A., Dudek, G., & Giguère, P. (2017). Control, localization and human interaction with an autonomous lighter-than-air performer. Robotic and Autonomous Systems, 88, 165–186.
Bibtex source - Zhang, J., & Singh, S. (2015). LOAM: Lidar odometry and mapping in real-time. IEEE Transactions on Robotics, 32(7), 141–148.
Bibtex source